Certainty-equivalent adaptive MPC for uncertain nonlinear systems
作者: Johannes Köhler
分类: math.OC, eess.SY
发布日期: 2026-03-18
备注: Code available at: https://github.com/KohlerJohannes/Adaptive
💡 一句话要点
提出基于确定性等价自适应MPC方法,用于解决不确定非线性系统的控制问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自适应控制 模型预测控制 非线性系统 鲁棒控制 参数不确定性
📋 核心要点
- 针对非线性系统控制中模型不确定性问题,现有方法鲁棒性不足或需要大量离线设计。
- 提出一种基于确定性等价MPC的自适应控制方法,结合最小均方参数自适应,提升鲁棒性。
- 数值实验表明,该方法在具有较大参数不确定性的线性及非线性系统中表现良好。
📝 摘要(中文)
本文提出了一种使用模型预测控制(MPC)为非线性系统设计自适应控制器的方法。通过将确定性等价MPC公式与最小均方参数自适应相结合,我们获得了一种具有强大鲁棒性保证的自适应控制器:累积跟踪误差和状态约束违反与噪声能量、扰动能量和参数变化路径长度呈线性关系。一个关键的技术贡献是开发了底层确定性等价MPC,它可以跟踪输出参考、考虑执行器限制和期望的状态约束,不需要系统特定的离线设计,并提供强大的固有鲁棒性。这通过利用有限horizon展开、人工参考、最近的基于优化的控制器分析技术和软状态约束来实现。对于开环稳定系统,我们推导出一个半全局结果,该结果适用于任意大的测量噪声、扰动和参数不确定性。对于可稳定系统,我们推导出一个区域结果,该结果在给定的吸引区域内且对于足够小的不确定性有效。通过数值模拟,展示了该方法在具有较大参数不确定性的系统中的适用性和优势:一个线性稳定的质量-弹簧-阻尼器链和一个非线性不稳定的四旋翼飞行器导航障碍物。
🔬 方法详解
问题定义:论文旨在解决不确定非线性系统的控制问题,尤其是在存在参数不确定性、测量噪声和扰动的情况下,如何设计一个鲁棒的控制器,使其能够跟踪期望的输出参考并满足状态约束。现有方法通常需要大量的离线设计,或者在面对较大的不确定性时表现出较差的鲁棒性。
核心思路:论文的核心思路是将确定性等价MPC与最小均方参数自适应相结合。确定性等价MPC使用当前参数估计值作为真实值进行优化,而最小均方参数自适应则用于在线更新参数估计。这种结合使得控制器能够适应系统参数的变化,并对不确定性具有一定的鲁棒性。
技术框架:该自适应控制器的整体框架包括以下几个主要模块:1) 确定性等价MPC:基于当前参数估计值,通过优化求解一个有限horizon的控制序列,以最小化跟踪误差和约束违反。2) 最小均方参数自适应:利用测量数据在线更新系统参数的估计值。3) 人工参考生成:为了提高跟踪性能,引入人工参考轨迹。4) 软状态约束:允许状态约束在一定程度上被违反,以提高控制器的鲁棒性。
关键创新:该论文的关键创新在于将确定性等价MPC与最小均方参数自适应相结合,并证明了该方法具有较强的鲁棒性。此外,论文还提出了一种新的确定性等价MPC设计,该设计不需要系统特定的离线设计,并具有固有的鲁棒性。与现有方法相比,该方法能够更好地处理不确定性,并提供更强的性能保证。
关键设计:确定性等价MPC的关键设计包括:1) 有限horizon的长度选择:horizon长度需要根据系统的动态特性和计算资源进行权衡。2) 软状态约束的惩罚权重:惩罚权重需要足够大,以保证状态约束在大部分时间内得到满足,但又不能太大,以免影响控制器的性能。3) 最小均方参数自适应的学习率:学习率需要根据噪声水平和参数变化速度进行调整。此外,论文还使用了人工参考轨迹来提高跟踪性能,人工参考轨迹的设计需要保证其与期望的输出参考轨迹接近,并且满足系统的动态约束。
🖼️ 关键图片


📊 实验亮点
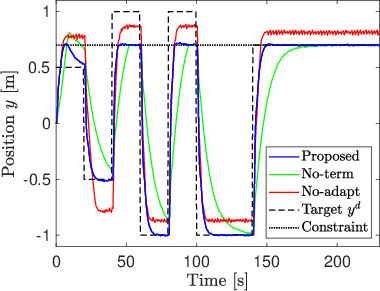
论文通过数值模拟验证了所提出方法的有效性。在具有较大参数不确定性的线性质量-弹簧-阻尼器链和非线性四旋翼飞行器导航障碍物实验中,该方法均表现出良好的跟踪性能和鲁棒性。实验结果表明,该方法能够有效地处理参数不确定性、测量噪声和扰动,并满足状态约束。
🎯 应用场景
该研究成果可应用于各种存在模型不确定性的非线性系统控制,例如机器人、无人机、自动驾驶车辆和过程控制等领域。该方法能够提高这些系统在复杂环境下的控制性能和鲁棒性,具有重要的实际应用价值和潜力。未来,该方法可以进一步扩展到更复杂的系统和环境,例如具有时变延迟和非线性扰动的系统。
📄 摘要(原文)
We provide a method to design adaptive controllers for nonlinear systems using model predictive control (MPC). By combining a certainty-equivalent MPC formulation with least-mean-square parameter adaptation, we obtain an adaptive controller with strong robust performance guarantees: The cumulative tracking error and violation of state constraints scale linearly with noise energy, disturbance energy, and path length of parameter variation. A key technical contribution is developing the underlying certainty-equivalent MPC that tracks output references, accounts for actuator limitations and desired state constraints, requires no system-specific offline design, and provides strong inherent robustness properties. This is achieved by leveraging finite-horizon rollouts, artificial references, recent analysis techniques for optimization-based controllers, and soft state constraints. For open-loop stable systems, we derive a semi-global result that applies to arbitrarily large measurement noise, disturbances, and parametric uncertainty. For stabilizable systems, we derive a regional result that is valid within a given region of attraction and for sufficiently small uncertainty. Applicability and benefits are demonstrated with numerical simulations involving systems with large parametric uncertainty: a linear stable chain of mass-spring-dampers and a nonlinear unstable quadrotor navigating obstacles.