Exponential stability of data-driven nonlinear MPC based on input/output models
作者: Lea Bold, Irene Schimperna, Karl Worthmann, Johannes Köhler
分类: math.OC, eess.SY
发布日期: 2026-03-17
💡 一句话要点
基于输入输出数据的非线性MPC指数稳定性分析
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非线性模型预测控制 数据驱动控制 指数稳定性 输入输出模型 核插值
📋 核心要点
- 传统非线性MPC依赖精确模型,但实际系统建模困难,数据驱动方法提供了一种替代方案。
- 本文提出一种基于输入输出数据的非线性MPC方案,利用代理模型进行优化,降低了对精确模型的依赖。
- 通过理论分析证明了该方案在一定条件下的指数稳定性,并通过核插值和数值实验验证了其有效性。
📝 摘要(中文)
本文研究了非线性模型预测控制(MPC)方案,该方案在优化步骤中使用仅基于输入输出数据的代理模型。在充分长的预测范围内,假设指数可镇定性和比例误差界限,我们建立了指数稳定性。此外,我们使用核插值验证了对近似的强加条件,并通过数值示例证明了其对非线性系统的实际适用性。
🔬 方法详解
问题定义:本文旨在解决非线性系统模型预测控制中对精确系统模型的依赖问题。传统MPC方法需要精确的系统模型,但在实际应用中,获取精确模型往往非常困难。数据驱动的MPC方法通过利用输入输出数据来构建代理模型,从而避免了对精确模型的依赖,但其稳定性分析是一个挑战。
核心思路:本文的核心思路是利用输入输出数据构建代理模型,并将其用于非线性MPC的优化步骤中。通过假设指数可镇定性和比例误差界限,证明了在足够长的预测范围内,该方案具有指数稳定性。这种方法的核心在于利用数据来近似系统动态,并在MPC框架下保证闭环系统的稳定性。
技术框架:该方法的技术框架主要包括以下几个步骤:1) 从系统中收集输入输出数据;2) 利用收集到的数据构建代理模型;3) 将代理模型嵌入到非线性MPC的优化问题中;4) 求解优化问题,得到控制输入;5) 将控制输入应用到实际系统中。整个过程形成一个闭环控制系统,通过不断优化控制输入,实现对系统的控制。
关键创新:本文的关键创新在于证明了基于输入输出数据的非线性MPC方案的指数稳定性。以往的研究主要集中在算法设计和性能优化上,而对稳定性的理论分析较少。本文通过严格的数学推导,证明了在一定条件下,该方案能够保证闭环系统的指数稳定性,为数据驱动的MPC方法提供了理论基础。
关键设计:本文的关键设计包括:1) 代理模型的选择,本文使用核插值方法构建代理模型;2) 预测范围的长度,需要足够长才能保证稳定性;3) 比例误差界限的选取,需要满足一定的条件才能保证稳定性。此外,优化问题的求解也需要选择合适的算法,以保证求解效率和精度。
🖼️ 关键图片

📊 实验亮点
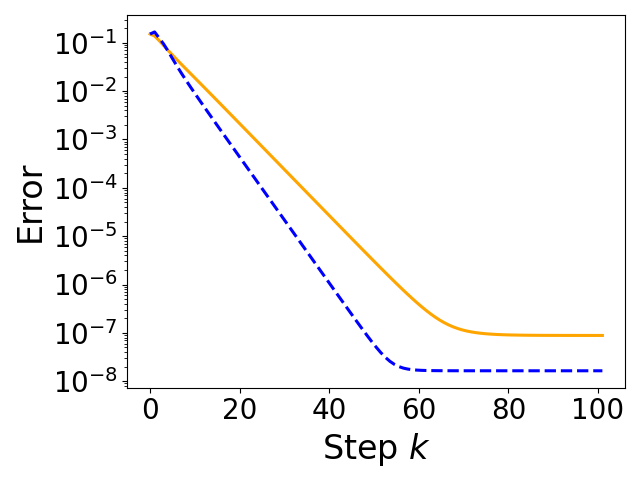
本文通过数值实验验证了所提出的非线性MPC方案的有效性。实验结果表明,该方案能够有效地控制非线性系统,并具有良好的稳定性和鲁棒性。此外,实验还验证了核插值方法在构建代理模型方面的适用性,为实际应用提供了参考。
🎯 应用场景
该研究成果可应用于各种非线性系统的控制,尤其适用于难以建立精确模型的复杂系统,例如机器人、化工过程、电力系统等。通过利用系统的输入输出数据,可以实现对系统的有效控制,提高系统的性能和稳定性。未来,该方法有望在智能制造、自动驾驶等领域发挥重要作用。
📄 摘要(原文)
We consider nonlinear model predictive control (MPC) schemes using surrogate models in the optimization step based on input-output data only. We establish exponential stability for sufficiently long prediction horizons assuming exponential stabilizability and a proportional error bound. Moreover, we verify the imposed condition on the approximation using kernel interpolation and demonstrate the practical applicability to nonlinear systems with a numerical example.