Rendezvous and Docking of Mobile Ground Robots for Efficient Transportation Systems
作者: Lars Fischer, Daniel Flögel, Sören Hohmann
分类: eess.SY, cs.RO
发布日期: 2026-02-23
备注: 8 pages, conference paper
💡 一句话要点
提出中央MPC方法以解决移动地面机器人对接问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 移动机器人 物理耦合 中央MPC 物流效率 自动化运输 动态建模 接近策略
📋 核心要点
- 现有方法未能有效建模移动机器人对接接口及接近策略,导致碰撞失控,影响耦合效率。
- 本文提出中央MPC方法,明确建模机器人动态,结合对接约束,实现可靠的运动中耦合。
- 实验结果表明,该方法在物流场景中实现了19.75%的时间效率和21.04%的能量效率提升。
📝 摘要(中文)
在运动中实现多个移动地面机器人的物理耦合具有改善物流效率的潜力。然而,现有方法未能有效建模对接接口及其接近策略,导致碰撞失控,影响耦合效率。为此,本文提出了一种中央模型预测控制(MPC)方法,明确建模两台全向轮机器人之间的动态和状态,结合对接接口相关约束,并实现接近策略。该方法使得全向轮机器人能够在任意初始位置下实现物理耦合,并在物流场景中实现了19.75%的时间效率和21.04%的能量效率提升。
🔬 方法详解
问题定义:本文旨在解决移动地面机器人在任意初始位置下实现可靠的运动中物理耦合的问题。现有方法忽视了对接接口的建模和接近策略,导致碰撞失控,影响耦合的可行性和效率。
核心思路:提出的中央MPC方法通过明确建模两台全向轮机器人的动态和状态,结合对接接口的约束条件,设计了一种有效的接近策略,以实现运动中物理耦合。
技术框架:该方法的整体架构包括动态建模模块、约束处理模块和接近策略模块。动态建模模块负责描述机器人的运动特性,约束处理模块确保对接过程中的安全性,而接近策略模块则指导机器人如何有效接近对接接口。
关键创新:本文的主要创新在于将中央MPC方法应用于移动机器人对接问题,明确建模动态和约束条件,使得机器人能够在任意初始位置下实现高效的运动中耦合。这一方法与现有方法的本质区别在于其对接接口的建模和接近策略的设计。
关键设计:在参数设置上,本文对MPC控制器的预测时域、控制增益等进行了优化。损失函数设计考虑了耦合效率和安全性,确保机器人在接近过程中避免碰撞,同时实现高效的物理耦合。
🖼️ 关键图片
📊 实验亮点
实验结果显示,提出的方法在物流场景中实现了19.75%的时间效率提升和21.04%的能量效率提升,相较于非耦合方法,显著提高了物理耦合的效率。这一结果验证了中央MPC方法在实际应用中的有效性和优势。
🎯 应用场景
该研究的潜在应用领域包括物流运输、自动化仓储和智能制造等。通过实现移动机器人之间的高效耦合,可以显著提升货物处理和转运的效率,降低人力成本,推动智能物流系统的发展。未来,该技术有望在更广泛的场景中应用,促进机器人协作和自动化水平的提升。
📄 摘要(原文)
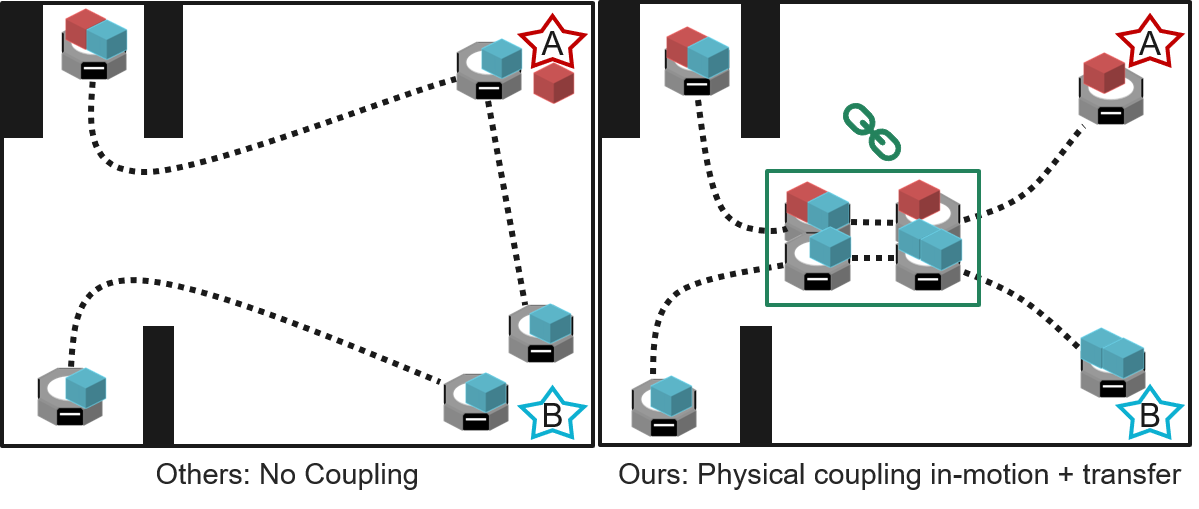
In-Motion physical coupling of multiple mobile ground robots has the potential to enable new applications like in-motion transfer that improves efficiency in handling and transferring goods, which tackles current challenges in logistics. A key challenge lies in achieving reliable autonomous in-motion physical coupling of two mobile ground robots starting at any initial position. Existing approaches neglect the modeling of the docking interface and the strategy for approaching it, resulting in uncontrolled collisions that make in-motion physical coupling either impossible or inefficient. To address this challenge, we propose a central mpc approach that explicitly models the dynamics and states of two omnidirectional wheeled robots, incorporates constraints related to their docking interface, and implements an approaching strategy for rendezvous and docking. This novel approach enables omnidirectional wheeled robots with a docking interface to physically couple in motion regardless of their initial position. In addition, it makes in-motion transfer possible, which is 19.75% more time- and 21.04% energy-efficient compared to a non-coupling approach in a logistic scenario.