Convex Block-Cholesky Approach to Risk-Constrained Low-thrust Trajectory Design under Operational Uncertainty
作者: Kenshiro Oguri, Gregory Lantoine
分类: eess.SY, math.OC
发布日期: 2026-02-20
💡 一句话要点
提出基于凸优化的块Cholesky方法,解决不确定性下低推力轨道设计中的风险约束问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 低推力轨道设计 风险约束优化 不确定性量化 最优协方差控制 序列凸规划
📋 核心要点
- 现有低推力轨道设计方法难以有效应对初始状态偏差、导航误差等操作不确定性带来的风险。
- 论文提出一种基于块Cholesky分解的凸优化方法,结合最优协方差控制和序列凸规划,实现风险约束下的轨迹优化。
- 通过对矮行星谷神星的探测任务进行仿真,验证了该方法在不确定性下的鲁棒性和有效性。
📝 摘要(中文)
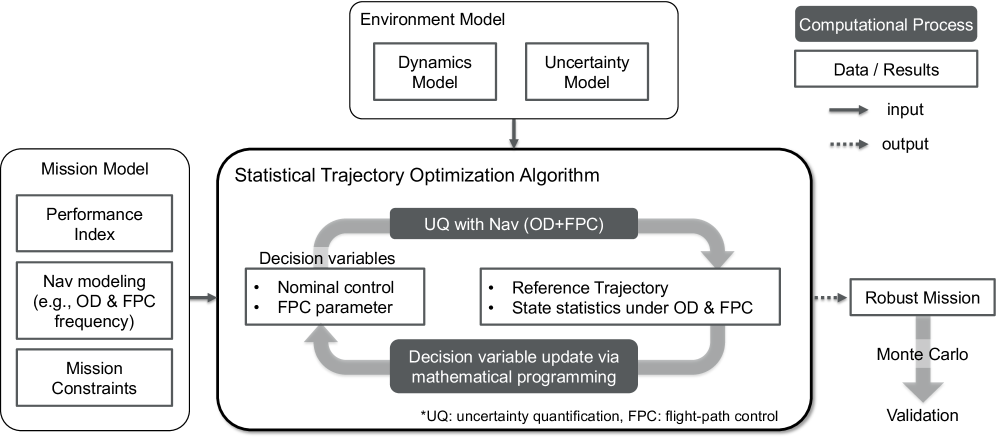
本文针对不确定性下的鲁棒轨道设计问题,提出了一种新的算法,旨在解决航天任务设计中的关键范式转变。随着科学目标的日益复杂,考虑导航过程变得至关重要。导航过程本质上是统计性的,包括轨道确定和飞行路径控制。因此,需要能够量化导航统计效应、评估相关风险,并设计确保足够低风险同时最小化统计性能指标(如Delta-V99)的任务。本文将风险约束下的轨迹优化问题建模为非线性随机最优控制问题,并提出了一种计算上可行的算法,该算法结合了最优协方差控制和序列凸规划(SCP)。该算法采用块Cholesky方法对最优协方差控制进行凸公式化,并利用最新的SCvx*算法实现可靠的数值收敛。最后,将该算法应用于矮行星谷神星的风险约束统计轨迹优化,并通过非线性蒙特卡罗模拟验证了统计最优轨迹和飞行路径控制策略的鲁棒性。
🔬 方法详解
问题定义:论文旨在解决在操作不确定性(包括初始状态偏差、导航误差、机动执行误差和不完善的动力学建模)下,如何设计满足风险约束的低推力轨道。现有方法难以在考虑这些不确定性的同时,有效地进行轨迹优化,尤其是在保证数值收敛性和计算效率方面存在挑战。传统的确定性优化方法无法直接处理这些统计不确定性,而直接应用蒙特卡罗方法进行优化则计算成本过高。
核心思路:论文的核心思路是将风险约束下的随机最优控制问题转化为一个凸优化问题,从而利用高效的凸优化算法求解。具体而言,通过最优协方差控制来显式地管理状态的不确定性,并使用块Cholesky分解将协方差矩阵的约束转化为凸约束。同时,利用序列凸规划(SCP)方法迭代地逼近非线性动力学,从而实现全局优化。
技术框架:整体框架包括以下几个主要阶段:1) 问题建模:将风险约束下的轨迹优化问题建模为非线性随机最优控制问题。2) 凸公式化:利用最优协方差控制和块Cholesky分解,将问题转化为凸优化问题。3) 序列凸规划:使用SCvx*算法迭代地逼近非线性动力学,求解凸优化问题。4) 蒙特卡罗验证:通过非线性蒙特卡罗模拟验证优化后的轨迹和飞行路径控制策略的鲁棒性。
关键创新:论文的关键创新在于:1) 提出了一种基于块Cholesky分解的凸优化方法,用于解决最优协方差控制中的协方差矩阵约束问题,从而保证了凸性。2) 将最优协方差控制与序列凸规划相结合,实现对非线性随机最优控制问题的有效求解。3) 利用SCvx*算法,提高了数值收敛的可靠性。与现有方法相比,该方法能够在考虑操作不确定性的同时,有效地进行风险约束下的轨迹优化。
关键设计:论文的关键设计包括:1) 使用Delta-V99作为性能指标,衡量最坏情况下的Delta-V消耗。2) 采用块Cholesky分解将协方差矩阵约束转化为凸约束,保证了问题的凸性。3) 利用SCvx*算法进行序列凸规划,该算法能够处理非凸约束,并提供收敛性保证。4) 通过蒙特卡罗模拟验证优化后的轨迹和飞行路径控制策略的鲁棒性,确保在实际操作中能够满足风险约束。
🖼️ 关键图片
📊 实验亮点
通过对矮行星谷神星的探测任务进行仿真,验证了该算法的有效性。蒙特卡罗模拟结果表明,该算法能够有效地降低任务风险,并优化Delta-V消耗。具体而言,优化后的轨迹能够在考虑操作不确定性的情况下,以较低的Delta-V成本实现对谷神星的探测,并且满足预设的风险约束。
🎯 应用场景
该研究成果可应用于深空探测任务、行星际转移轨道设计、卫星星座部署等领域,尤其适用于对任务风险有严格要求的场景。通过考虑操作不确定性,可以设计出更加鲁棒和可靠的航天任务,降低任务失败的风险,提高任务成功率,从而节省成本并提升任务价值。
📄 摘要(原文)
Designing robust trajectories under uncertainties is an emerging technology that may represent a key paradigm shift in space mission design. As we pursue more ambitious scientific goals (e.g., multi-moon tours, missions with extensive components of autonomy), it becomes more crucial that missions are designed with navigation (Nav) processes in mind. The effect of Nav processes is statistical by nature, as they consist of orbit determination (OD) and flight-path control (FPC). Thus, this mission design paradigm calls for techniques that appropriately quantify statistical effects of Nav, evaluate associated risks, and design missions that ensure sufficiently low risk while minimizing a statistical performance metric; a common metric is Delta-V99: worst-case (99%-quantile) Delta-V expenditure including statistical FPC efforts. In response to the need, this paper develops an algorithm for risk-constrained trajectory optimization under operational uncertainties due to initial state dispersion, navigation error, maneuver execution error, and imperfect dynamics modeling. We formulate it as a nonlinear stochastic optimal control problem and develop a computationally tractable algorithm that combines optimal covariance steering and sequential convex programming (SCP). Specifically, the proposed algorithm takes a block-Cholesky approach for convex formulation of optimal covariance steering, and leverages a recent SCP algorithm, SCvx*, for reliable numerical convergence. We apply the developed algorithm to risk-constrained, statistical trajectory optimization for exploration of dwarf planet Ceres with a Mars gravity assist, and demonstrate the robustness of the statistically-optimal trajectory and FPC policies via nonlinear Monte Carlo simulation.