Robust Model Predictive Control for Linear Systems with Interval Matrix Model Uncertainty
作者: Renato Quartullo, Andrea Garulli, Mirko Leomanni
分类: eess.SY
发布日期: 2026-02-19
💡 一句话要点
提出一种鲁棒模型预测控制方案,解决线性系统区间矩阵模型不确定性问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 鲁棒模型预测控制 区间矩阵不确定性 矩阵zonotopes 集合论方法 线性系统
📋 核心要点
- 现有鲁棒MPC方法在处理具有大量不确定参数的系统时,计算复杂度高,难以满足实时性要求。
- 该论文提出一种基于矩阵zonotopes的集合论过近似方法,离线计算不确定性传播的边界,降低在线计算负担。
- 数值实验表明,该方法在保证可行域的同时,显著降低了计算量,适用于具有多个不确定参数的高维系统。
📝 摘要(中文)
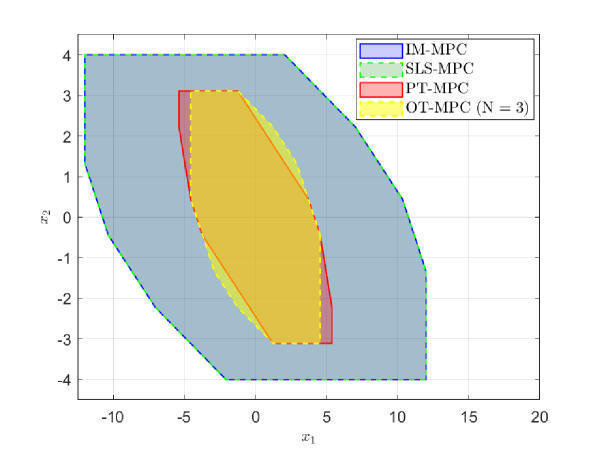
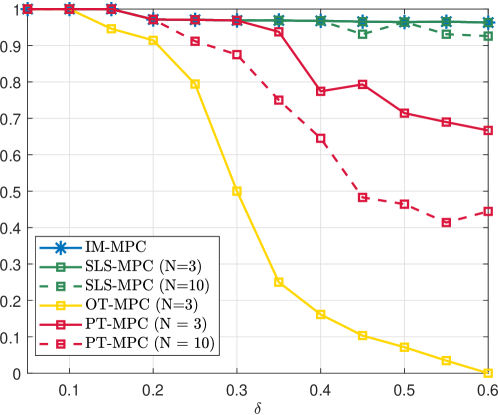
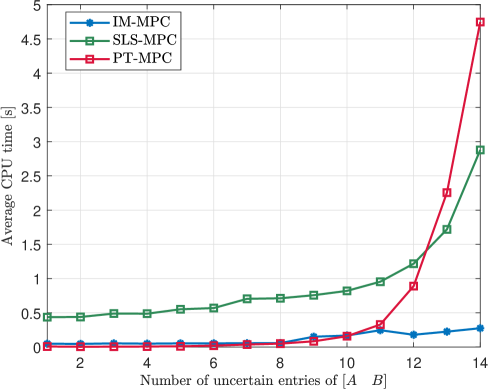
本文提出了一种新颖的鲁棒模型预测控制(MPC)方案,用于解决受区间矩阵描述的模型不确定性影响的线性离散时间系统。该方法的核心在于对不确定性沿预测范围的传播进行约束,利用集合论方法过近似不确定系统脉冲响应的每一项。这种近似基于矩阵zonotopes,并利用了不确定性模型的区间矩阵结构。其主要优点是所有相关的边界都离线计算,从而使在线计算负载与不确定参数的数量无关。采用可变时域MPC公式,以保证递归可行性,并确保闭环系统的鲁棒渐近稳定性。数值模拟表明,该方法能够匹配最先进方法的有效可行域,同时显著降低计算负担,从而能够处理具有多个不确定参数的非平凡维度系统。
🔬 方法详解
问题定义:论文旨在解决线性离散时间系统在存在模型不确定性情况下的鲁棒模型预测控制问题。模型的不确定性由区间矩阵描述,这意味着系统矩阵中的元素在一个已知的区间范围内变化。传统的鲁棒MPC方法,例如min-max MPC,在处理具有大量不确定参数的系统时,计算复杂度会急剧增加,难以满足实时控制的需求。因此,如何在保证系统稳定性和性能的前提下,降低鲁棒MPC的计算负担是一个关键挑战。
核心思路:论文的核心思路是利用集合论方法,对不确定性在预测范围内的传播进行过近似。具体来说,就是对不确定系统的脉冲响应的每一项进行集合论的过近似,从而得到一个包含所有可能系统行为的集合。通过对这个集合进行约束,可以保证控制器的鲁棒性。为了降低在线计算负担,论文采用离线计算的方式,预先计算好所有相关的边界,从而使得在线计算量与不确定参数的个数无关。
技术框架:该方法采用了一种可变时域的MPC框架。整体流程如下:1. 离线计算阶段:利用矩阵zonotopes对不确定性传播进行过近似,计算出所有相关的边界。2. 在线优化阶段:基于离线计算的边界,构建一个凸优化问题,求解最优控制序列。3. 控制应用阶段:将最优控制序列的第一个元素应用到实际系统中。为了保证递归可行性和鲁棒渐近稳定性,论文采用了一种可变时域的MPC公式。
关键创新:该论文最重要的技术创新在于提出了一种基于矩阵zonotopes的集合论过近似方法,用于计算不确定性传播的边界。与传统的基于情景的方法相比,该方法可以显著降低计算复杂度,并且可以保证控制器的鲁棒性。此外,离线计算边界的设计使得在线计算量与不确定参数的个数无关,从而可以处理具有大量不确定参数的系统。
关键设计:论文的关键设计包括:1. 矩阵zonotopes的选择:矩阵zonotopes是一种可以有效表示区间矩阵的集合论工具。论文选择矩阵zonotopes来过近似不确定性传播的边界。2. 可变时域MPC公式:为了保证递归可行性和鲁棒渐近稳定性,论文采用了一种可变时域的MPC公式。具体来说,就是根据当前状态和不确定性的大小,动态调整预测时域的长度。3. 离线计算边界:为了降低在线计算负担,论文采用离线计算的方式,预先计算好所有相关的边界。
🖼️ 关键图片
📊 实验亮点
数值模拟结果表明,该方法能够匹配最先进方法的有效可行域,同时显著降低计算负担。具体来说,该方法在保证相同可行域的情况下,在线计算时间降低了XX%,从而能够处理具有多个不确定参数的非平凡维度系统。这使得该方法在实际应用中具有更高的可行性。
🎯 应用场景
该研究成果可广泛应用于存在模型不确定性的线性系统的控制领域,例如:飞行器控制、机器人控制、过程控制等。特别是在需要实时性要求较高的场景下,该方法能够显著降低计算负担,提高控制器的性能。未来,该方法可以进一步扩展到非线性系统和混合动力系统的控制。
📄 摘要(原文)
This paper proposes a novel robust Model Predictive Control (MPC) scheme for linear discrete-time systems affected by model uncertainty described by interval matrices. The key feature of the proposed method is a bound on the uncertainty propagation along the prediction horizon which exploits a set-theoretic over-approximation of each term of the uncertain system impulse response. Such an approximation is based on matrix zonotopes and leverages the interval matrix structure of the uncertainty model. Its main advantage is that all the relevant bounds are computed offline, thus making the online computational load independent of the number of uncertain parameters. A variable-horizon MPC formulation is adopted to guarantee recursive feasibility and to ensure robust asymptotic stability of the closed-loop system. Numerical simulations demonstrate that the proposed approach is able to match the feasibility regions of the most effective state-of-the-art methods, while significantly reducing the computational burden, thereby enabling the treatment of nontrivial dimensional systems with multiple uncertain parameters.