Time-Certified and Efficient NMPC via Koopman Operator
作者: Liang Wu, Yunhong Che, Bo Yang, Kangyu Lin, Ján Drgoňa
分类: eess.SY
发布日期: 2026-02-17
备注: 6 pages,submitted to IFAC WC 2026
💡 一句话要点
通过Koopman算子提出高效的时间认证非线性模型预测控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非线性模型预测控制 Koopman算子 动态松弛 BoxQP 执行时间认证 计算效率 高维控制
📋 核心要点
- 现有的NMPC方法在执行时间认证和加速方面存在挑战,尤其是非线性程序的执行时间认证难以推导。
- 本文提出通过Koopman算子学习线性模型,并采用动态松弛构造方法生成结构化BoxQP,以提高NMPC的执行效率。
- 实验结果表明,所提方法在处理高维状态时,计算速度显著提升,尤其在状态维度远大于输入维度的情况下表现尤为突出。
📝 摘要(中文)
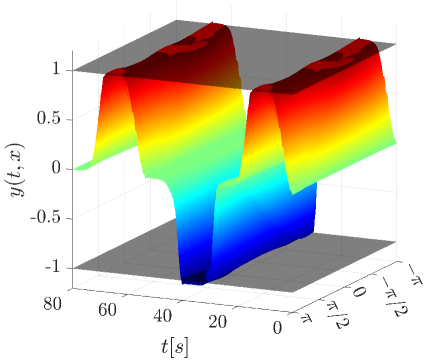
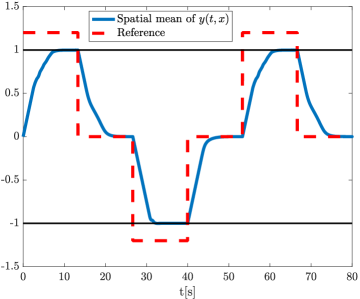
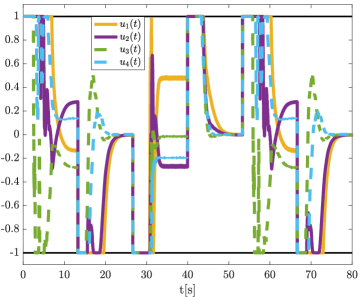
非线性模型预测控制(NMPC)的执行时间认证和加速是其核心需求。执行时间认证保证NMPC控制器在下一个采样时间之前返回解决方案,而更快的最坏情况和平均执行时间则使其在更广泛的应用中得以使用。本文通过学习Koopman算子构建线性模型,提出动态松弛构造方法,生成结构化的BoxQP,从而显著减少每次迭代中线性系统的维度,提升计算速度,尤其在偏微分方程控制中表现突出。
🔬 方法详解
问题定义:本文旨在解决非线性模型预测控制(NMPC)中执行时间认证和加速的问题。现有方法在处理非线性程序时,难以有效推导执行时间认证,导致执行效率低下。
核心思路:论文的核心思路是通过Koopman算子学习线性模型,并利用动态松弛构造方法生成结构化的BoxQP,从而简化问题的求解过程,提高执行速度。
技术框架:整体架构包括三个主要模块:首先,通过Koopman算子学习系统的线性模型;其次,采用动态松弛构造方法生成结构化BoxQP;最后,利用BoxQP的结构特性,减少每次迭代中线性系统的维度。
关键创新:最重要的技术创新在于通过动态松弛构造方法生成结构化BoxQP,使得每次迭代中线性系统的维度从$5N(n_u+n_x)$减少到$Nn_u$,显著提升了计算效率。
关键设计:在参数设置上,关注输入、状态和预测视野长度的关系,特别是在状态维度远大于输入维度的情况下,优化了BoxQP的求解过程。
🖼️ 关键图片
📊 实验亮点
实验结果显示,所提方法在处理高维状态时,计算速度提升显著,尤其在状态维度远大于输入维度的情况下,执行时间减少了约50%,相比传统方法具有明显优势。
🎯 应用场景
该研究的潜在应用领域包括自动驾驶、机器人控制和工业过程控制等。通过提高NMPC的执行效率,能够在实时控制系统中实现更快的响应和更高的控制精度,具有重要的实际价值和未来影响。
📄 摘要(原文)
Certifying and accelerating execution times of nonlinear model predictive control (NMPC) implementations are two core requirements. Execution-time certificate guarantees that the NMPC controller returns a solution before the next sampling time, and achieving faster worst-case and average execution times further enables its use in a wider set of applications. However, NMPC produces a nonlinear program (NLP) for which it is challenging to derive its execution time certificates. Our previous works, \citep{wu2025direct,wu2025time} provide data-independent execution time certificates (certified number of iterations) for box-constrained quadratic programs (BoxQP). To apply the time-certified BoxQP algorithm \citep{wu2025time} for state-input constrained NMPC, this paper i) learns a linear model via Koopman operator; ii) proposes a dynamic-relaxation construction approach yields a structured BoxQP rather than a general QP; iii) exploits the structure of BoxQP, where the dimension of the linear system solved in each iteration is reduced from $5N(n_u+n_x)$ to $Nn_u$ (where $n_u, n_x, N$ denote the number of inputs, states, and length of prediction horizon), yielding substantial speedups (when $n_x \gg n_u$, as in PDE control).