Multi-UAV Trajectory Optimization for Bearing-Only Localization in GPS Denied Environments
作者: Alfonso Sciacchitano, Liraz Mudrik, Sean Kragelund, Isaac Kaminer
分类: eess.SY, cs.RO, math.OC
发布日期: 2026-02-11
备注: 38 pages, 7 figure, and 6 tables
💡 一句话要点
提出一种多无人机协同轨迹优化方法,用于GPS拒止环境下仅方位角定位。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多无人机协同 轨迹优化 目标定位 GPS拒止环境 非万向节相机
📋 核心要点
- 在GPS拒止环境下,依赖万向节光电传感器的无人机定位海上目标,存在机械复杂、成本高、易发生单点故障等问题。
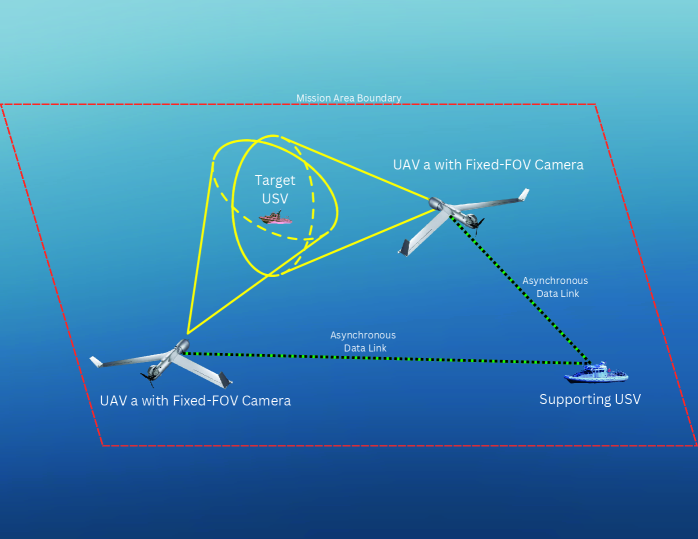
- 提出一种估计感知轨迹优化框架,利用配备固定式非万向节相机的无人机与水面舰艇协同,实现目标定位。
- 实验表明,该方法生成的轨迹优于启发式路径,定位误差降低两倍以上,且精度可媲美甚至超过单万向节系统。
📝 摘要(中文)
在GPS拒止环境中,利用无人机(UAV)精确定位海上目标仍然具有挑战性。通常使用配备万向节光电传感器的无人机来定位目标,然而,对这些传感器的依赖增加了机械复杂性、成本以及单点故障的风险,限制了多无人机操作的可扩展性和鲁棒性。本文提出了一种新的轨迹优化框架,该框架支持使用配备固定式非万向节相机的无人机与水面舰艇协同工作,从而实现协同目标定位。这种估计感知优化方法生成动态可行的轨迹,明确考虑了任务约束、平台动力学和超出视野范围的事件。实验表明,估计感知轨迹优于启发式路径,定位误差降低了两倍以上,证明了其在协同操作中的应用价值。结果进一步表明,配备固定式非万向节相机的协同无人机能够实现与单个万向节系统相当甚至更高的定位精度,同时显著降低系统复杂性和成本,从而提高可扩展性和任务弹性。
🔬 方法详解
问题定义:论文旨在解决GPS拒止环境下,使用配备固定式非万向节相机的多无人机系统进行海上目标精确定位的问题。现有方法依赖于配备万向节光电传感器的无人机,这增加了系统的复杂性、成本和单点故障的风险,限制了多无人机协同操作的扩展性和鲁棒性。
核心思路:核心思路是通过轨迹优化,使无人机在满足任务约束和平台动力学的前提下,能够以最佳的观测角度和位置对目标进行定位。通过协同优化多个无人机的轨迹,可以弥补固定相机带来的观测角度限制,并提高定位精度。
技术框架:该框架包含以下主要模块:1) 目标状态估计器:用于估计目标的位置和速度。2) 轨迹优化器:根据目标状态估计、任务约束和平台动力学,生成无人机的最优轨迹。3) 运动规划器:将优化后的轨迹转换为无人机可执行的运动指令。4) 控制器:控制无人机按照规划的轨迹飞行。该框架还考虑了超出视野范围的事件,并将其纳入轨迹优化中。
关键创新:最重要的创新点在于提出了“估计感知”的轨迹优化方法。传统的轨迹优化方法通常只考虑运动学和动力学约束,而忽略了目标状态估计的不确定性。该方法将目标状态估计的不确定性纳入轨迹优化中,使得生成的轨迹能够最大程度地减少定位误差。
关键设计:轨迹优化器使用非线性优化方法,例如序列二次规划(SQP),来求解最优轨迹。目标函数包括定位误差、轨迹长度和控制能量等。约束条件包括无人机的动力学约束、任务约束(例如,避障、保持通信)和超出视野范围的约束。关键参数包括目标状态估计的协方差矩阵、轨迹优化器的权重系数和约束条件的容忍度。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法生成的估计感知轨迹优于启发式路径,定位误差降低了两倍以上。与单个配备万向节相机的无人机系统相比,配备固定式非万向节相机的协同无人机能够实现相当甚至更高的定位精度,同时显著降低系统复杂性和成本。这些结果验证了该方法的有效性和实用性。
🎯 应用场景
该研究成果可应用于海上搜救、环境监测、边境巡逻等领域。通过使用低成本、高鲁棒性的多无人机系统,可以在GPS拒止环境下实现对目标的精确定位和跟踪,提高任务效率和安全性。未来,该技术还可以扩展到其他领域,例如室内导航、灾害救援等。
📄 摘要(原文)
Accurate localization of maritime targets by unmanned aerial vehicles (UAVs) remains challenging in GPS-denied environments. UAVs equipped with gimballed electro-optical sensors are typically used to localize targets, however, reliance on these sensors increases mechanical complexity, cost, and susceptibility to single-point failures, limiting scalability and robustness in multi-UAV operations. This work presents a new trajectory optimization framework that enables cooperative target localization using UAVs with fixed, non-gimballed cameras operating in coordination with a surface vessel. This estimation-aware optimization generates dynamically feasible trajectories that explicitly account for mission constraints, platform dynamics, and out-of-frame events. Estimation-aware trajectories outperform heuristic paths by reducing localization error by more than a factor of two, motivating their use in cooperative operations. Results further demonstrate that coordinated UAVs with fixed, non-gimballed cameras achieve localization accuracy that meets or exceeds that of single gimballed systems, while substantially lowering system complexity and cost, enabling scalability, and enhancing mission resilience.