Trajectory-based data-driven predictive control and the state-space predictor
作者: Levi D. Reyes Premer, Arash J. Khabbazi, Kevin J. Kircher
分类: eess.SY, math.OC
发布日期: 2026-02-11
💡 一句话要点
提出基于状态空间预测器的轨迹预测控制,提升数据驱动预测控制性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 数据驱动控制 预测控制 状态空间模型 轨迹预测 模型预测控制
📋 核心要点
- 传统数据驱动预测控制方法参数众多,对训练数据需求量大,限制了其在数据量有限场景下的应用。
- 论文提出基于状态空间模型的轨迹预测器,将轨迹预测控制问题转化为线性模型预测控制的特例,简化了模型结构。
- 实验结果表明,在小数据集下,该方法优于其他预测器,且性能逼近理想情况下的最优控制性能。
📝 摘要(中文)
本文定义了轨迹预测控制(TPC)作为一种输出反馈的间接数据驱动预测控制(DDPC)方法族,该方法将离散时间系统的输出轨迹表示为近期输入/输出历史和计划输入轨迹的线性函数。本文表明,对于轨迹预测器的不同选择,TPC涵盖了各种DDPC方法,包括子空间预测控制(SPC)、闭环SPC、$γ$-DDPC、因果-$γ$-DDPC、瞬态预测控制等。本文引入了一种轨迹预测器,它对应于一个线性状态空间模型,并将近期输入/输出历史作为状态。使用这种状态空间预测器,TPC是线性模型预测控制的一个特例,因此继承了其成熟的理论。在数值实验中,TPC的性能接近于具有底层系统模型完美知识的oracle $H_2$-最优控制的极限。对于具有小训练数据集的TPC,状态空间预测器优于其他预测器,因为它具有更少的参数。
🔬 方法详解
问题定义:现有的数据驱动预测控制(DDPC)方法,如子空间预测控制(SPC)等,通常需要大量的训练数据才能获得良好的性能。当训练数据有限时,这些方法的性能会显著下降,限制了其在实际应用中的可行性。此外,不同DDPC方法之间缺乏统一的理论框架,难以进行比较和选择。
核心思路:本文的核心思路是将DDPC问题转化为一个轨迹预测问题,并使用状态空间模型来预测系统的未来轨迹。通过将近期输入/输出历史作为状态,可以有效地利用历史信息来预测未来行为。此外,将DDPC问题转化为线性模型预测控制(MPC)的特例,可以直接利用MPC的成熟理论和工具。
技术框架:整体框架包括以下几个主要步骤:1) 利用历史输入/输出数据训练状态空间预测器;2) 基于状态空间预测器,将未来输出轨迹表示为近期输入/输出历史和计划输入轨迹的线性函数;3) 构建优化问题,通过优化计划输入轨迹,最小化预测输出与期望输出之间的误差;4) 将优化问题转化为标准的二次规划问题,并利用现成的求解器进行求解。
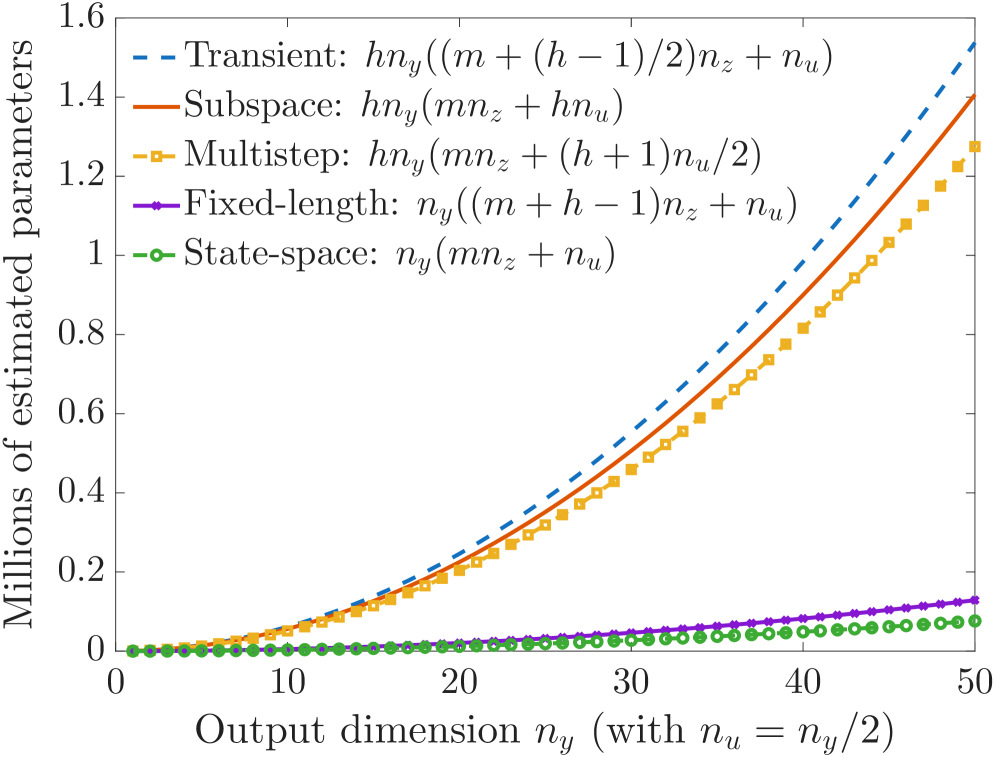
关键创新:最重要的技术创新点是引入了基于状态空间模型的轨迹预测器。与传统的DDPC方法相比,该方法具有更少的参数,因此对训练数据的需求更低。此外,该方法将DDPC问题转化为线性MPC的特例,可以直接利用MPC的成熟理论和工具,例如稳定性分析和鲁棒性设计。
关键设计:状态空间模型的具体形式为:x(k+1) = Ax(k) + Bu(k), y(k) = Cx(k) + Du(k),其中x(k)是状态向量,由近期输入/输出历史组成,u(k)是输入向量,y(k)是输出向量。矩阵A, B, C, D通过最小二乘法从历史数据中学习得到。优化目标通常是最小化预测输出与期望输出之间的均方误差,并可以加入输入约束和状态约束。
🖼️ 关键图片
📊 实验亮点
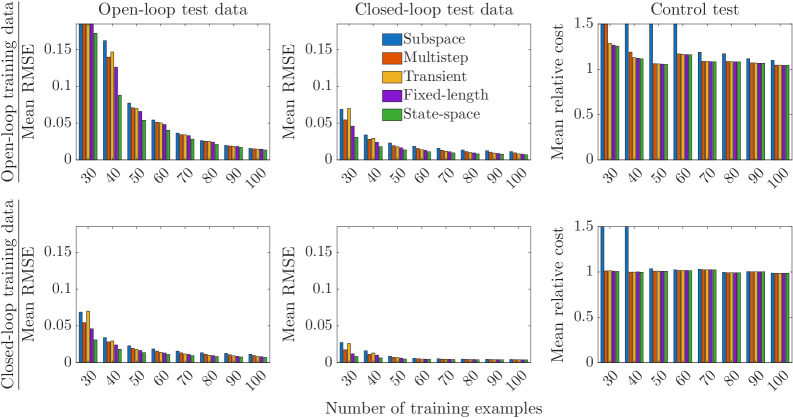
数值实验表明,在小训练数据集下,基于状态空间预测器的TPC方法优于其他DDPC方法。具体来说,该方法在性能上接近于具有完美系统模型知识的oracle H2-最优控制的极限。这表明该方法能够有效地利用有限的数据,并获得接近最优的控制性能。
🎯 应用场景
该研究成果可应用于各种需要进行预测控制的场景,例如机器人控制、过程控制、智能交通系统等。特别是在数据获取成本较高或数据量有限的情况下,该方法具有显著的优势。例如,在一些工业过程中,由于传感器故障或实验成本的限制,难以获得大量的训练数据,此时该方法可以有效地提高控制性能。
📄 摘要(原文)
We define trajectory predictive control (TPC) as a family of output-feedback indirect data-driven predictive control (DDPC) methods that represent the output trajectory of a discrete-time system as a linear function of the recent input/output history and the planned input trajectory. This paper shows that for different choices of the trajectory predictor, TPC encompasses a wide variety of DDPC methods, including subspace predictive control (SPC), closed-loop SPC, $γ$-DDPC, causal-$γ$-DDPC, transient predictive control, and others. This paper introduces a trajectory predictor that corresponds to a linear state-space model with the recent input/output history as the state. With this state-space predictor, TPC is a special case of linear model predictive control and therefore inherits its mature theory. In numerical experiments, TPC performance approaches the limit of oracle $H_2$-optimal control with perfect knowledge of the underlying system model. For TPC with small training datasets, the state-space predictor outperforms other predictors because it has fewer parameters.