Quantum Riemannian Cubics with Obstacle Avoidance for Quantum Geometric Model Predictive Control
作者: Leonardo Colombo
分类: math-ph, eess.SY, math.OC, quant-ph
发布日期: 2026-02-09
💡 一句话要点
提出基于量子黎曼三次样条的量子几何模型预测控制方法,解决带约束量子系统控制问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 量子控制 模型预测控制 黎曼几何 量子系统 约束优化
📋 核心要点
- 现有量子控制方法难以处理平滑性和状态约束,限制了其在复杂量子系统中的应用。
- 该论文提出在投影希尔伯特空间上进行量子态演化,通过惩罚协变加速度生成平滑轨迹。
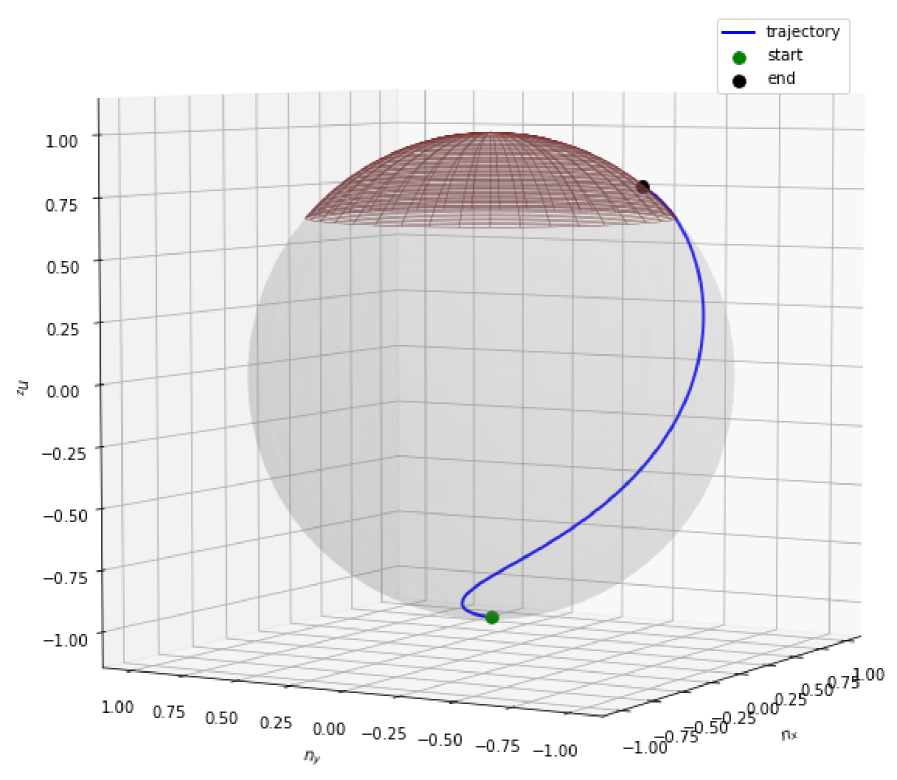
- 通过在布洛赫球上对二能级量子系统进行实验,验证了该方法在约束量子动力学控制中的可行性。
📝 摘要(中文)
本文提出了一种针对具有平滑性和状态约束的量子系统的几何模型预测控制框架。通过在投影希尔伯特空间上内在地描述量子态演化,我们惩罚协变加速度,以生成黎曼三次样条形式的平滑轨迹,同时通过势函数结合状态相关的约束。一种保持结构的变分离散化方法实现了后退水平线的实现,并为闭环系统建立了一个李雅普诺夫型稳定性结果。该方法在一个二能级量子系统的布洛赫球上进行了说明,为约束量子动力学的预测反馈控制提供了一条可行的途径。
🔬 方法详解
问题定义:论文旨在解决量子系统在存在平滑性和状态约束条件下的轨迹规划与控制问题。现有的量子控制方法通常难以直接处理这些约束,导致控制效果不佳,尤其是在需要高精度和稳定性的量子计算和量子信息处理应用中。
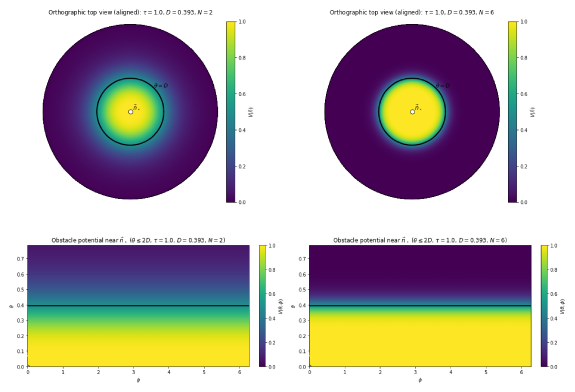
核心思路:论文的核心思路是将量子态的演化过程视为投影希尔伯特空间上的几何运动,并利用黎曼几何的概念来设计控制策略。通过惩罚协变加速度,可以生成平滑的轨迹,同时利用势函数来处理状态约束,确保系统在安全区域内运行。
技术框架:该方法采用几何模型预测控制(Geometric Model Predictive Control, GMP)框架。首先,在投影希尔伯特空间上建立量子系统的动力学模型。然后,设计一个目标函数,该函数包括对协变加速度的惩罚项和对状态约束的势函数项。接着,使用变分离散化方法将连续时间问题转化为离散时间优化问题。最后,采用后退水平线策略进行在线优化,实现闭环控制。
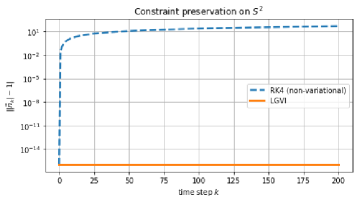
关键创新:该方法的关键创新在于将黎曼几何的概念引入到量子控制中,利用协变加速度来生成平滑轨迹,并使用势函数来处理状态约束。这种方法能够有效地处理量子系统中的非线性动力学和约束条件,提高控制性能。此外,结构保持的变分离散化方法保证了数值计算的稳定性和精度。
关键设计:关键设计包括:1) 协变加速度的定义,它反映了量子态演化的几何特性;2) 势函数的设计,用于惩罚违反状态约束的行为;3) 变分离散化方案,用于将连续时间优化问题转化为离散时间问题;4) 李雅普诺夫函数的设计,用于证明闭环系统的稳定性。
🖼️ 关键图片
📊 实验亮点
论文在布洛赫球上对一个二能级量子系统进行了实验验证。实验结果表明,该方法能够有效地生成满足状态约束的平滑轨迹,并实现对量子系统的精确控制。通过对协变加速度的惩罚,轨迹的平滑性得到了显著改善,从而提高了控制性能和稳定性。该方法为约束量子动力学的预测反馈控制提供了一条可行的途径。
🎯 应用场景
该研究成果可应用于量子计算、量子通信和量子传感等领域。例如,在量子计算中,可以利用该方法精确控制量子比特的状态,实现高保真度的量子门操作。在量子通信中,可以利用该方法优化量子态的传输轨迹,提高通信效率和安全性。在量子传感中,可以利用该方法设计高灵敏度的量子传感器。
📄 摘要(原文)
We propose a geometric model predictive control framework for quantum systems subject to smoothness and state constraints. By formulating quantum state evolution intrinsically on the projective Hilbert space, we penalize covariant accelerations to generate smooth trajectories in the form of Riemannian cubics, while incorporating state-dependent constraints through potential functions. A structure-preserving variational discretization enables receding-horizon implementation, and a Lyapunov-type stability result is established for the closed-loop system. The approach is illustrated on the Bloch sphere for a two-level quantum system, providing a viable pathway toward predictive feedback control of constrained quantum dynamics.