Robust and Gain-Scheduling ${\cal H}_2$ Control Techniques for LFT Uncertain and Parameter-Dependent Systems
作者: Fen Wu
分类: eess.SY
发布日期: 2026-02-08
💡 一句话要点
针对LFT不确定性和参数相关系统,提出鲁棒和增益调度H2控制技术
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 鲁棒控制 H2控制 线性分式变换 不确定性系统 参数依赖系统
📋 核心要点
- 传统鲁棒控制方法在处理参数不确定性系统时存在保守性,难以兼顾性能与鲁棒性。
- 通过引入中间矩阵变量,推导出基于线性矩阵不等式的凸优化条件,实现鲁棒和增益调度控制器的设计。
- 数值和应用结果表明,该方法能有效降低保守性,提升抗扰性能,优于传统鲁棒H无穷控制。
📝 摘要(中文)
本文研究了针对具有结构化不确定性(参数)和白噪声扰动的线性分式变换(LFT)系统的鲁棒${\cal H}2$综合问题。通过引入中间矩阵变量,我们推导出了线性矩阵不等式(LMIs)形式的凸综合条件,从而能够为参数相关系统设计鲁棒和增益调度控制器。所提出的框架保留了${\cal H}_2$准则的经典白噪声和脉冲响应解释,同时提供了经过认证的鲁棒性保证,从而将最优${\cal H}_2$控制扩展到线性时不变设置之外。数值和应用示例表明,与传统的基于鲁棒${\cal H}\infty$的设计相比,所得到的鲁棒${\cal H}_2$控制器实现了显著降低的保守性和改进的抗扰性能。
🔬 方法详解
问题定义:论文旨在解决具有线性分式变换(LFT)不确定性和参数依赖性的系统的鲁棒${\cal H}2$控制问题。现有方法,特别是基于${\cal H}\infty$的鲁棒控制设计,在处理此类系统时通常过于保守,导致性能下降。此外,传统方法难以直接处理参数随时间变化的情况,限制了其在实际应用中的效果。
核心思路:论文的核心思路是通过引入一个中间矩阵变量,将鲁棒${\cal H}_2$控制器的设计问题转化为一个凸优化问题,该问题可以通过线性矩阵不等式(LMI)求解。这种方法能够降低设计的保守性,并允许设计增益调度控制器,从而适应参数的变化。
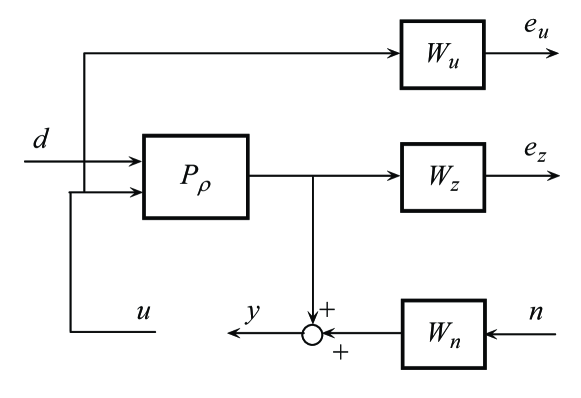
技术框架:该方法首先对LFT不确定性和参数依赖性系统进行建模。然后,引入中间矩阵变量,将鲁棒${\cal H}_2$控制器的设计问题转化为一个LMI优化问题。通过求解该LMI,可以获得鲁棒${\cal H}_2$控制器。对于参数依赖性系统,可以通过增益调度方法,根据参数的变化调整控制器的参数。整体流程包括系统建模、LMI条件推导、LMI求解和控制器实现。
关键创新:该论文的关键创新在于引入了中间矩阵变量,从而将鲁棒${\cal H}2$控制器的设计问题转化为一个凸优化问题。与传统的基于${\cal H}\infty$的设计相比,这种方法能够显著降低保守性,并允许设计增益调度控制器。此外,该方法保留了${\cal H}_2$准则的经典白噪声和脉冲响应解释,从而保证了控制器的性能。
关键设计:关键设计在于中间矩阵变量的选择和LMI条件的推导。中间矩阵变量的选择需要保证LMI条件的可解性,并尽可能降低保守性。LMI条件的推导需要仔细考虑系统的动态特性和不确定性,以保证控制器的鲁棒性和性能。此外,对于参数依赖性系统,需要设计合适的增益调度策略,以根据参数的变化调整控制器的参数。
🖼️ 关键图片
📊 实验亮点
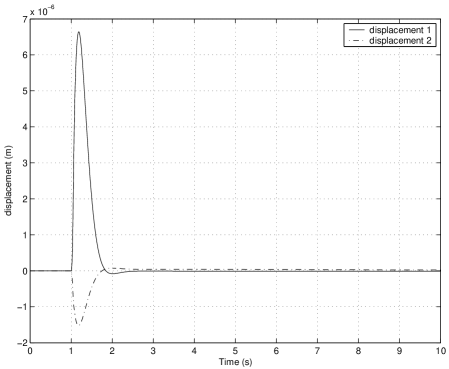
数值和应用示例表明,与传统的基于鲁棒${\cal H}_\infty$的设计相比,所提出的鲁棒${\cal H}_2$控制器实现了显著降低的保守性和改进的抗扰性能。具体性能提升数据未知,但论文强调了在降低保守性方面的显著优势。
🎯 应用场景
该研究成果可应用于航空航天、汽车工程、机器人等领域,解决具有参数不确定性和时变特性的复杂系统的控制问题。例如,飞行器的姿态控制、汽车的悬架控制、机器人的运动控制等。通过降低控制器的保守性,可以提高系统的性能和鲁棒性,从而提高系统的安全性和可靠性。
📄 摘要(原文)
This paper addresses the robust ${\cal H}2$ synthesis problem for linear fractional transformation (LFT) systems subject to structured uncertainty (parameter) and white-noise disturbances. By introducing an intermediate matrix variable, we derive convex synthesis conditions in terms of linear matrix inequalities (LMIs) that enable both robust and gain-scheduled controller design for parameter-dependent systems. The proposed framework preserves the classical white-noise and impulse-response interpretation of the ${\cal H}_2$ criterion while providing certified robustness guarantees, thereby extending optimal ${\cal H}_2$ control beyond the linear time-invariant setting. Numerical and application examples demonstrate that the resulting robust ${\cal H}_2$ controllers achieve significantly reduced conservatism and improved disturbance rejection compared with conventional robust ${\cal H}\infty$-based designs.