$π$MPC: A Parallel-in-horizon and Construction-free NMPC Solver
作者: Liang Wu, Bo Yang, Xu Yang, Yilin Mo, Yang Shi, Ján Drgoňa
分类: math.OC, eess.SY
发布日期: 2026-01-20
备注: 8 pages
💡 一句话要点
提出一种并行于预测范围且无需显式构造的非线性MPC求解器$π$MPC
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 非线性优化 交替方向乘子法 并行计算 嵌入式系统
📋 核心要点
- 现有ADMM求解器在长预测范围下难以并行化,限制了其在复杂MPC问题中的应用。
- $π$MPC通过新的变量分解和基于速度的系统表示,实现了预测范围上的并行计算。
- 数值实验验证了$π$MPC的有效性,表明其在并行计算方面具有优势。
📝 摘要(中文)
交替方向乘子法(ADMM)因其代码简洁和参数选择简便,在嵌入式模型预测控制(MPC)中越来越受欢迎。然而,现有的ADMM求解器要么针对通用的二次规划(QP)问题,要么通过Riccati递归利用稀疏MPC公式,这些方法本质上是顺序的,因此难以针对长预测范围进行并行化。本技术报告提出了一种新颖的 extit{并行于预测范围}且 extit{无需显式构造}的非线性MPC算法,称为$π$MPC,它将一种新的变量分解方案与ADMM框架中基于速度的系统表示相结合,从而能够在水平方向上并行执行,同时直接对系统矩阵进行操作,而无需显式地将MPC转换为QP。数值实验和随附代码验证了所提出方法的有效性。
🔬 方法详解
问题定义:论文旨在解决非线性模型预测控制(NMPC)中,当预测范围较长时,现有基于ADMM的求解器难以并行化的问题。传统的ADMM方法,要么处理通用的二次规划问题,要么依赖于Riccati递归,这些方法本质上是串行的,无法充分利用并行计算资源,导致计算效率低下。
核心思路:论文的核心思路是设计一种新的变量分解方案,并结合基于速度的系统表示,使得ADMM算法能够在预测范围上并行执行。通过这种方式,可以将整个优化问题分解为多个独立的子问题,每个子问题对应于预测范围内的某个时间步,从而可以同时求解这些子问题。
技术框架:$π$MPC算法的整体框架如下:首先,采用基于速度的系统表示,将原始的系统状态方程转换为基于速度的方程。然后,引入新的变量分解方案,将优化问题分解为多个子问题。接着,利用ADMM算法迭代求解这些子问题,并在每次迭代中更新对偶变量。最后,根据求解结果计算控制输入。该框架避免了显式地将MPC问题转换为QP问题,直接在系统矩阵上进行操作。
关键创新:最重要的技术创新点在于提出了 extit{并行于预测范围}的ADMM算法。与传统的ADMM方法不同,$π$MPC能够将整个优化问题分解为多个独立的子问题,从而实现并行计算。此外,$π$MPC还避免了显式地构造QP问题,直接在系统矩阵上进行操作,进一步提高了计算效率。
关键设计:在变量分解方面,论文设计了一种新的分解方案,使得每个子问题只依赖于相邻时间步的状态和控制输入。在ADMM算法的参数设置方面,需要仔细调整惩罚参数,以保证算法的收敛性和计算效率。此外,基于速度的系统表示也是一个关键设计,它简化了优化问题的形式,并有助于实现并行计算。
🖼️ 关键图片
📊 实验亮点
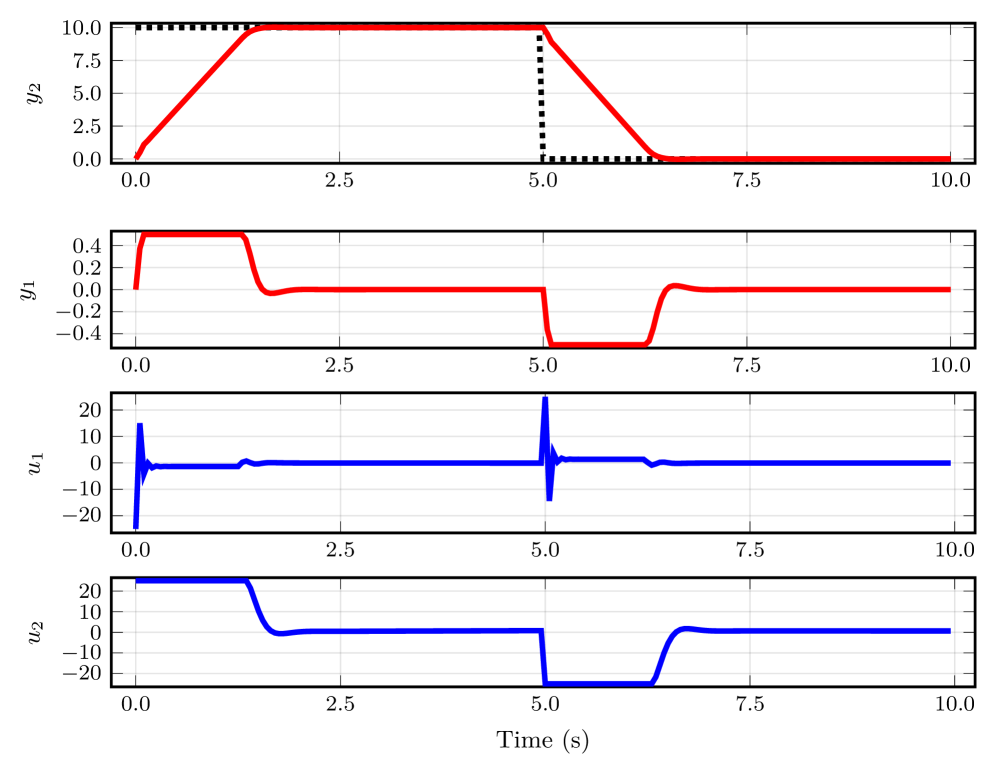
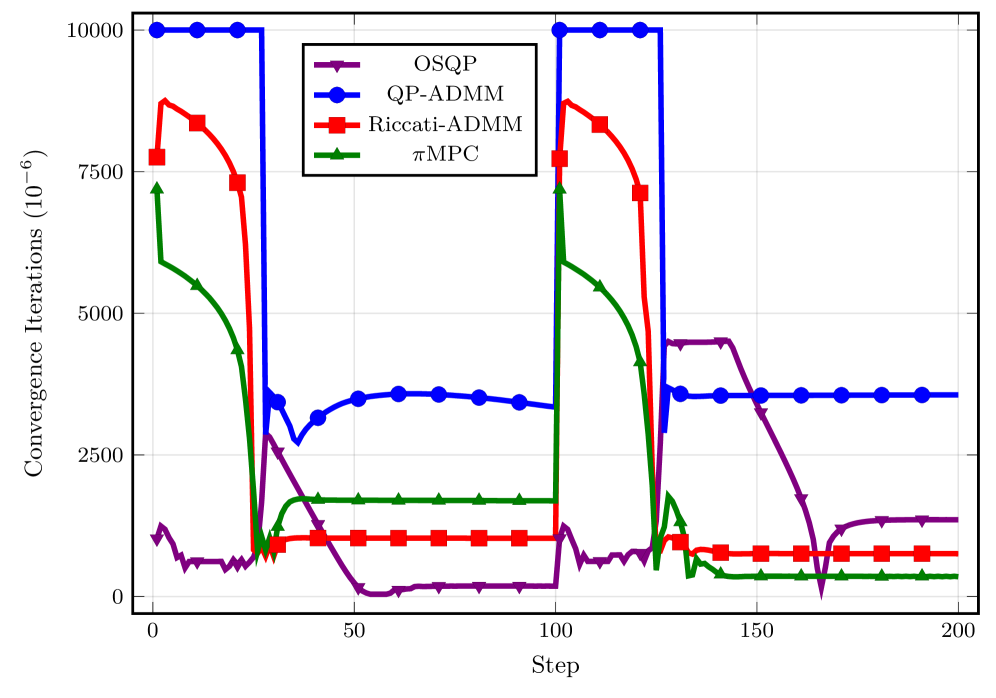
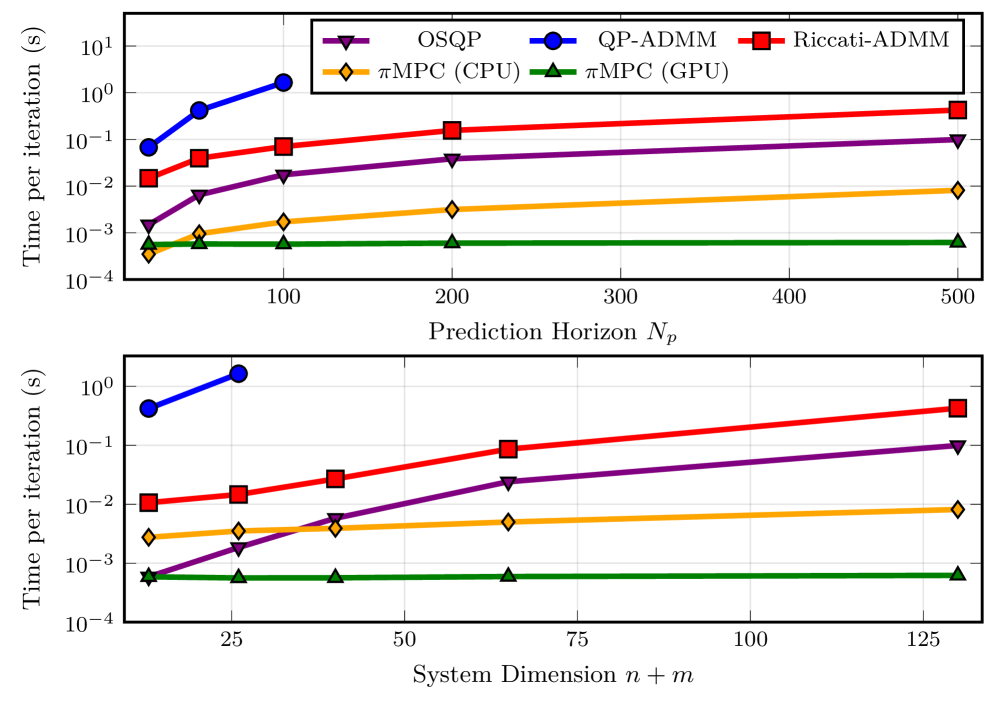
论文通过数值实验验证了$π$MPC算法的有效性。实验结果表明,$π$MPC能够在保证控制性能的同时,显著提高计算效率。与传统的ADMM方法相比,$π$MPC在长预测范围下具有更强的并行计算能力,能够更快地求解NMPC问题。具体的性能数据(例如计算时间、控制精度等)需要在论文中查找。
🎯 应用场景
$π$MPC算法适用于需要快速求解NMPC问题的各种应用场景,例如机器人控制、自动驾驶、过程控制等。尤其是在需要长预测范围或计算资源有限的嵌入式系统中,该算法的并行计算能力可以显著提高控制器的性能。未来,该算法可以进一步扩展到处理更复杂的约束和目标函数,并应用于更广泛的实际问题。
📄 摘要(原文)
The alternating direction method of multipliers (ADMM) has gained increasing popularity in embedded model predictive control (MPC) due to its code simplicity and pain-free parameter selection. However, existing ADMM solvers either target general quadratic programming (QP) problems or exploit sparse MPC formulations via Riccati recursions, which are inherently sequential and therefore difficult to parallelize for long prediction horizons. This technical note proposes a novel \textit{parallel-in-horizon} and \textit{construction-free} nonlinear MPC algorithm, termed $π$MPC, which combines a new variable-splitting scheme with a velocity-based system representation in the ADMM framework, enabling horizon-wise parallel execution while operating directly on system matrices without explicit MPC-to-QP construction. Numerical experiments and accompanying code are provided to validate the effectiveness of the proposed method.