Convex Model Predictive Control for Safe Output Consensus of Nonlinear Multi-Agent Systems
作者: Chao Wang, Shuyuan Zhang, Lei Wang
分类: eess.SY
发布日期: 2026-01-19
💡 一句话要点
提出基于SQP的凸模型预测控制,实现非线性多智能体系统安全输出一致性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 多智能体系统 安全控制 凸优化 序列二次规划
📋 核心要点
- 传统模型预测控制在处理非线性系统和安全约束时,通常面临求解非线性规划问题带来的高计算复杂度挑战。
- 论文提出一种基于序列二次规划(SQP)的凸模型预测控制(CMPC)方法,通过线性化系统动力学和凸化控制障碍函数,将问题转化为二次规划。
- 仿真结果表明,与现有方法相比,该方法在计算时间上显著减少(35-52倍),验证了其在实时安全输出一致性控制中的有效性。
📝 摘要(中文)
本文针对非线性多智能体系统安全输出一致性问题,提出了一种新的凸模型预测控制(CMPC)方法。该方法基于序列二次规划(SQP)方案,旨在避免直接求解非线性规划问题带来的巨大计算负担。核心思想是将非线性约束转化为线性形式:通过线性化系统动力学,并利用提出的切线投影方法凸化离散时间高阶控制障碍函数。因此,原始问题被简化为二次规划问题,可以在CMPC的每个时间步长内通过SQP方案迭代求解。此外,本文还提供了SQP方案收敛性的形式化保证,并进而保证了CMPC的递归可行性和稳定性。对具有单轮车动力学多智能体系统的仿真表明,与基线方法相比,计算时间减少了35-52倍,证实了该方法适用于实时安全输出一致性控制。
🔬 方法详解
问题定义:论文旨在解决非线性多智能体系统在满足安全约束条件下的输出一致性问题。现有方法,特别是直接应用模型预测控制(MPC),在处理非线性动力学和安全约束时,会导致复杂的非线性规划问题(NLP),计算量大,难以满足实时性要求。因此,如何在保证安全性的前提下,降低计算复杂度,是本研究要解决的核心问题。
核心思路:论文的核心思路是将非线性MPC问题转化为一个可以高效求解的凸优化问题。具体而言,通过线性化非线性系统动力学,并将非凸的安全约束(通常由控制障碍函数表示)进行凸化,从而将原问题转化为一个二次规划(QP)问题。由于QP问题具有高效的求解器,因此可以显著降低计算复杂度。
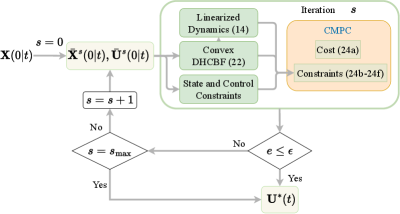
技术框架:该方法基于序列二次规划(SQP)框架。在每个时间步,首先对非线性系统动力学进行线性化,并利用提出的切线投影方法对高阶控制障碍函数进行凸化。然后,将线性化的动力学和凸化的安全约束代入MPC框架,形成一个QP问题。求解该QP问题得到控制输入,并将其应用于实际系统。在下一个时间步,重复上述过程,直到达到控制目标。SQP框架保证了算法的收敛性。
关键创新:论文的关键创新在于提出了基于切线投影的控制障碍函数凸化方法。传统的控制障碍函数通常是非凸的,难以直接应用于凸优化框架。该方法通过在当前状态下找到控制障碍函数的切线,并利用该切线来近似原始函数,从而实现凸化。这种方法不仅简单有效,而且能够保证安全约束的满足。
关键设计:论文的关键设计包括:1) 使用高阶控制障碍函数,以提供更强的安全保证;2) 采用切线投影方法进行凸化,确保凸化后的约束仍然能够保证系统的安全性;3) 基于SQP框架进行迭代求解,保证算法的收敛性和稳定性。具体参数设置和损失函数的设计取决于具体的系统动力学和安全约束。
🖼️ 关键图片

📊 实验亮点
实验结果表明,与传统的非线性MPC方法相比,该方法在计算时间上显著减少,减少幅度达到35-52倍。这使得该方法能够满足实时控制的需求,从而可以应用于实际的多智能体系统。此外,实验还验证了该方法能够有效地保证系统的安全性和稳定性,确保智能体之间的安全距离和协同一致性。
🎯 应用场景
该研究成果可广泛应用于多智能体系统的协同控制领域,例如无人机编队飞行、自动驾驶车辆协同驾驶、机器人协作等。通过保证智能体之间的安全距离和协同一致性,可以提高系统的整体性能和安全性。此外,该方法还可以应用于其他具有非线性动力学和安全约束的控制系统,具有重要的实际应用价值和潜在的未来影响。
📄 摘要(原文)
Nonlinear dynamics and safety constraints typically result in a nonlinear programming problem when applying model predictive control to achieve safe output consensus. To avoid the heavy computational burden of solving a nonlinear programming problem directly, this paper proposes a novel Convex Model Predictive Control (CMPC) approach based on a Sequential Quadratic Programming (SQP) scheme. The core of our method lies in transforming the nonlinear constraints into linear forms: we linearize the system dynamics and convexify the discrete-time high-order control barrier functions using a proposed tangent-line projection method. Consequently, the original problem is reduced to a quadratic program that can be iteratively solved within the SQP scheme at each time step of CMPC. Furthermore, we provide the formal guarantee of the convergence of the SQP scheme, and subsequently guarantee the recursive feasibility and stability of CMPC. Simulations on multi-agent systems with unicycle dynamics demonstrate a 35-52 times reduction in computation time compared with baseline methods, confirming the suitability of the proposed approach for real-time safe output consensus control.