Safe Trajectory Gradient Flow Control of a Grid-Interfacing Inverter
作者: Trager Joswig-Jones, Baosen Zhang
分类: eess.SY
发布日期: 2026-01-15
备注: 5 pages, 4 figures, Submitted to PES-GM 2026
💡 一句话要点
提出安全轨迹梯度流控制器,解决并网逆变器约束控制问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 并网逆变器 安全控制 轨迹优化 梯度流 滚动时域控制
📋 核心要点
- 现有并网逆变器控制方法忽略硬件约束,依赖临时限幅器,易导致系统不稳定或性能下降。
- 提出安全轨迹梯度流控制器,通过滚动时域优化,确保轨迹在安全集内,并趋向最优平衡点。
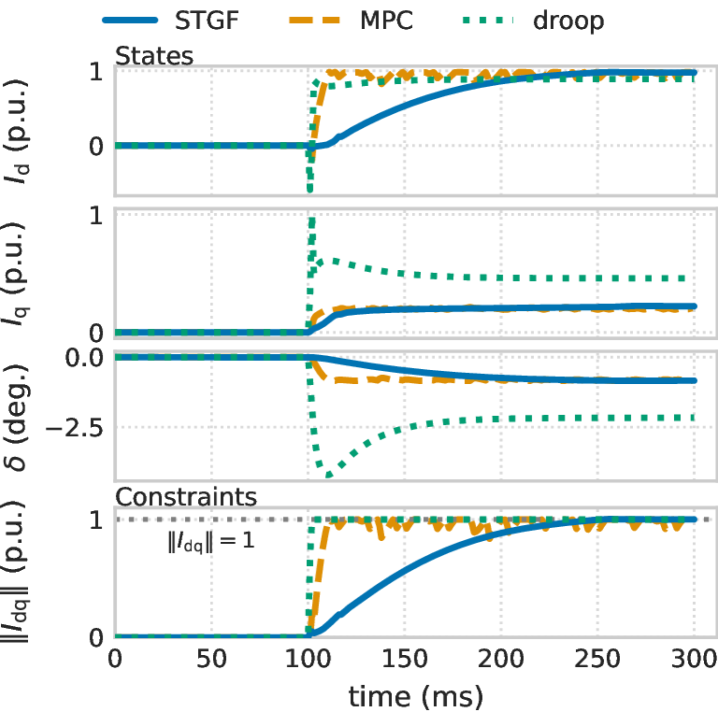
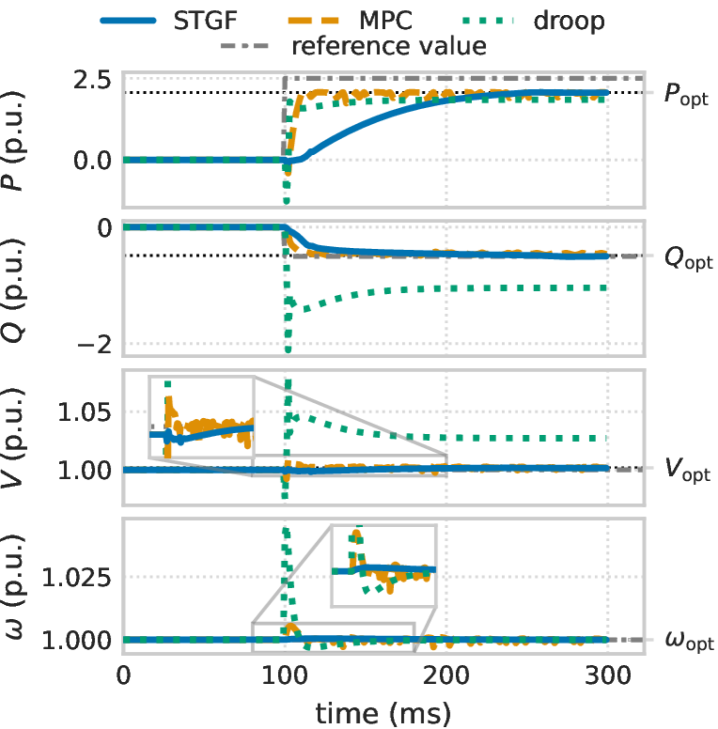
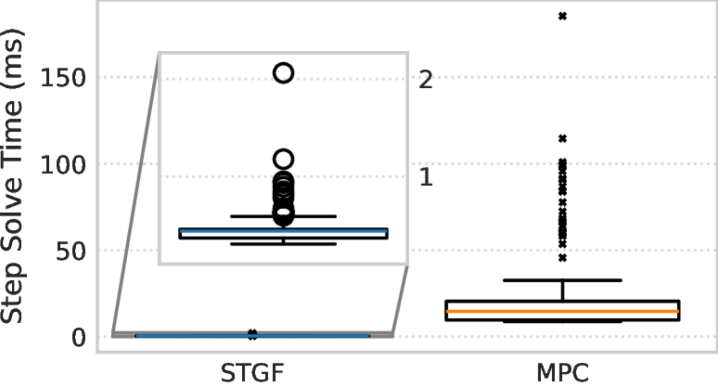
- 仿真结果表明,该方法能在有限优化步骤下,驱动逆变器输出至最优值,并维持状态约束。
📝 摘要(中文)
并网逆变器是可再生能源与电网之间的接口,提供快速可编程的控制能力。然而,其运行受到硬件限制,如电流幅值约束。现有的控制方法通常忽略这些约束,依赖于临时的限幅器,这可能导致不稳定或性能下降。本文提出了一种直接将约束纳入电压源逆变器控制的控制框架。我们提出了一种安全轨迹梯度流控制器,该控制器将安全梯度流方法应用于滚动时域轨迹优化问题,以确保状态保持在由约束定义的安全集合内,同时将轨迹引导至非线性规划的最优平衡点。仿真结果表明,即使每个控制周期使用的优化步骤有限,我们的方法也能驱动逆变器系统的输出达到最优值并保持状态约束。
🔬 方法详解
问题定义:论文旨在解决并网逆变器在满足硬件约束(如电流幅值限制)下的优化控制问题。现有控制方法通常在控制器设计阶段忽略这些约束,而是在控制回路中加入临时的限幅器。这种事后处理方式可能导致系统不稳定,降低控制性能,甚至无法保证系统的安全性。
核心思路:论文的核心思路是将硬件约束直接纳入控制器的设计过程中,通过优化方法保证控制过程中的状态始终处于安全集合内。具体而言,采用安全梯度流方法,在滚动时域优化框架下,引导系统轨迹向最优平衡点移动,同时避免违反约束。
技术框架:整体框架是一个滚动时域控制(RHC)结构,在每个控制周期内,求解一个轨迹优化问题。该优化问题以逆变器的状态方程为约束,以期望的运行点为目标。安全梯度流方法用于求解该优化问题,确保在迭代过程中,状态始终位于安全集合内。主要模块包括:状态估计、轨迹优化(基于安全梯度流)、控制量输出。
关键创新:关键创新在于将安全梯度流方法应用于并网逆变器的轨迹优化控制。安全梯度流方法能够显式地处理状态约束,保证控制过程的安全性。与传统的基于限幅器的控制方法相比,该方法能够更有效地利用系统的控制能力,提高控制性能。
关键设计:安全梯度流方法需要定义一个安全集合,该集合由逆变器的硬件约束(如电流幅值限制)确定。优化问题的目标函数通常是状态与期望运行点之间的距离。滚动时域控制的控制周期长度需要根据系统的动态特性和计算资源进行调整。安全梯度流的步长需要仔细选择,以保证收敛速度和安全性。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,所提出的安全轨迹梯度流控制器能够有效地驱动逆变器输出达到最优值,并始终保持状态约束。即使在每个控制周期内只进行有限的优化步骤,该方法也能保证系统的安全运行。与传统的基于限幅器的控制方法相比,该方法能够获得更好的控制性能和更高的系统安全性。具体性能提升数据未知。
🎯 应用场景
该研究成果可应用于各种可再生能源并网逆变器的控制,例如光伏逆变器、风力发电逆变器等。通过保证逆变器在硬件约束下的安全运行,可以提高电网的稳定性和可靠性,促进可再生能源的广泛应用。此外,该方法也可推广到其他受约束的控制系统,例如电力电子变换器、电机驱动等。
📄 摘要(原文)
Grid-interfacing inverters serve as the interface between renewable energy resources and the electric power grid, offering fast, programmable control capabilities. However, their operation is constrained by hardware limitations, such as bounds on the current magnitude. Existing control methods for these systems often neglect these constraints during controller design and instead rely on ad hoc limiters, which can introduce instability or degrade performance. In this work, we present a control framework that directly incorporates constraints into the control of a voltage-source inverter. We propose a safe trajectory gradient flow controller, which applies the safe gradient flow method to a rolling horizon trajectory optimization problem to ensure that the states remain within a safe set defined by the constraints while directing the trajectory towards an optimal equilibrium point of a nonlinear program. Simulation results demonstrate that our approach can drive the outputs of a simulated inverter system to optimal values and maintain state constraints, even when using a limited number of optimization steps per control cycle.