Optimal-coupling-observer AV motion control securing comfort in the presence of cyber attacks
作者: Farzam Tajdari, Georgios Papaioannou, Riender Happee
分类: eess.SY
发布日期: 2025-12-22
DOI: 10.1109/TITS.2025.3629989
💡 一句话要点
提出基于最优耦合观测器的AV运动控制框架,保障网络攻击下的舒适性
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 自动驾驶 网络安全 最优耦合观测器 运动控制 乘坐舒适性
📋 核心要点
- 现有自动驾驶车辆安全研究较少关注网络攻击下的乘坐舒适性,这是一个重要的研究空白。
- 论文提出一种基于最优耦合观测器的框架,通过快速检测和切换到可靠传感器来减轻攻击影响,保障安全和舒适。
- 实验表明,该方法能有效应对有界攻击,显著提升乘坐舒适性,避免碰撞,并符合ISO-2631标准。
📝 摘要(中文)
本文针对自动驾驶车辆(AV)在网络攻击下的安全性问题,提出了一种创新的基于最优耦合观测器的框架,旨在减轻有界传感器攻击对互联自动驾驶车辆网络的影响,兼顾安全性和舒适性。该方法在包含冗余距离和速度传感器的车队中,通过合作式自适应巡航控制进行车辆跟随实验验证。误差动态被建模为线性时变(LTV)系统,利用线性矩阵不等式(LMI)方法研究其复杂的稳定性条件,保证全局渐近稳定性。结果表明,该框架能够在有界攻击下保障乘员的安全和舒适性。在攻击发生时,该框架能够快速检测到受攻击的传感器,并切换到最可靠的观测器,即使攻击幅度不大也能消除攻击影响。相比之下,没有该方法时,严重的(但有界的)攻击会导致碰撞和严重的不适。使用该方法后,攻击对使用ISO-2631乘坐舒适性和晕动病指标评估的运动舒适性影响可忽略不计。该研究为将舒适性置于自动驾驶汽车安全研究的前沿铺平了道路。
🔬 方法详解
问题定义:自动驾驶车辆在互联环境中面临传感器网络攻击的风险,这些攻击可能导致车辆控制系统做出错误的决策,从而危及乘客的安全和舒适性。现有的安全控制方法通常只关注安全性,而忽略了乘坐舒适性,尤其是在遭受攻击时。因此,如何在网络攻击下保障自动驾驶车辆的安全性和乘坐舒适性是一个亟待解决的问题。
核心思路:论文的核心思路是设计一个最优耦合观测器,该观测器能够实时监测传感器数据,检测出受到攻击的传感器,并迅速切换到未受攻击的可靠传感器。通过这种方式,系统能够有效地抑制攻击的影响,保证车辆控制的准确性和稳定性,从而保障乘客的安全性和舒适性。这种设计思路的关键在于观测器的快速检测和切换能力,以及对系统稳定性的保证。
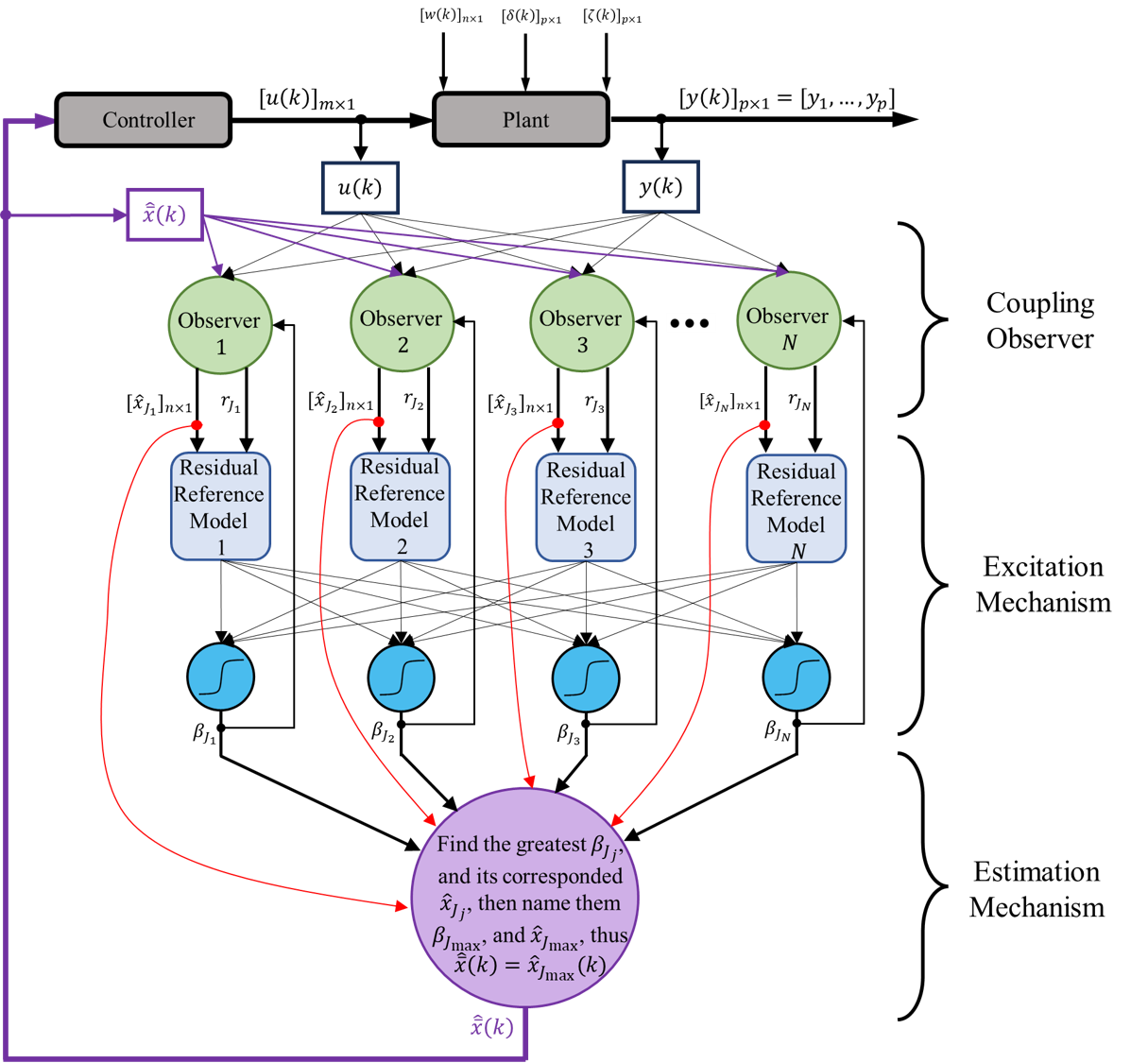
技术框架:该框架主要包含以下几个模块:1) 传感器数据采集模块:负责采集车辆的距离和速度等传感器数据。2) 最优耦合观测器模块:该模块是核心,负责实时监测传感器数据,检测攻击,并选择最可靠的传感器数据。3) 控制器模块:基于观测器提供的可靠数据,控制车辆的运动,实现合作式自适应巡航控制。4) 稳定性分析模块:使用线性矩阵不等式(LMI)方法分析系统的稳定性,保证全局渐近稳定性。整体流程是:传感器数据进入观测器,观测器检测攻击并选择可靠数据,然后控制器根据可靠数据进行车辆控制,同时LMI方法保证系统稳定性。
关键创新:该论文的关键创新在于将最优耦合观测器应用于自动驾驶车辆的安全控制,并同时考虑了安全性和乘坐舒适性。与传统的安全控制方法相比,该方法能够更有效地应对网络攻击,并保障乘客的乘坐舒适性。此外,该方法还采用了线性矩阵不等式(LMI)方法进行稳定性分析,保证了系统的全局渐近稳定性。
关键设计:误差动态被建模为线性时变(LTV)系统,这使得可以使用LMI方法进行稳定性分析。最优耦合观测器的设计需要仔细选择耦合参数,以实现快速的攻击检测和切换。控制器的设计需要考虑车辆的动力学特性和乘坐舒适性要求。ISO-2631标准被用于评估乘坐舒适性,这为评估方法的有效性提供了客观依据。攻击的幅度被限制为有界攻击,这符合实际情况,并简化了分析。
🖼️ 关键图片


📊 实验亮点
实验结果表明,在有界攻击下,没有该方法会导致碰撞和严重不适,而使用该方法后,攻击对使用ISO-2631乘坐舒适性和晕动病指标评估的运动舒适性影响可忽略不计。这表明该方法能够有效地抑制攻击的影响,保障乘客的安全和舒适性。即使在适度的攻击下,该方法也能快速检测并切换到可靠传感器,显著优于没有该方法的系统。
🎯 应用场景
该研究成果可应用于各种自动驾驶车辆,特别是需要高安全性和舒适性的场景,如自动驾驶出租车、自动驾驶巴士和自动驾驶物流车辆。该方法能够提高自动驾驶车辆在恶意网络环境下的可靠性和安全性,增强乘客的信任感,并促进自动驾驶技术的商业化应用。未来,该研究可以扩展到更复杂的攻击场景和更高级的自动驾驶系统。
📄 摘要(原文)
The security of Automated Vehicles (AVs) is an important emerging area of research in traffic safety. Methods have been published and evaluated in experimental vehicles to secure safe AV control in the presence of attacks, but human motion comfort is rarely investigated in such studies. In this paper, we present an innovative optimal-coupling-observer-based framework that rejects the impact of bounded sensor attacks in a network of connected and automated vehicles from safety and comfort point of view. We demonstrate its performance in car following with cooperative adaptive cruise control for platoons with redundant distance and velocity sensors. The error dynamics are formulated as a Linear Time Variant (LTV) system, resulting in complex stability conditions that are investigated using a Linear Matrix Inequality (LMI) approach guaranteeing global asymptotic stability. We prove the capability of the framework to secure occupants' safety and comfort in the presence of bounded attacks. In the onset of attack, the framework rapidly detects attacked sensors and switches to the most reliable observer eliminating attacked sensors, even with modest attack magnitudes. Without our proposed method, severe (but bounded) attacks result in collisions and major discomfort. With our method, attacks had negligible effects on motion comfort evaluated using ISO-2631 Ride Comfort and Motion Sickness indexes. The results pave the path to bring comfort to the forefront of AVs security.