Two-dimensional Decompositions of High-dimensional Configurations for Efficient Multi-vehicle Coordination at Intelligent Intersections
作者: Amirreza Akbari, Johan Thunberg
分类: eess.SY, cs.RO
发布日期: 2025-12-12
💡 一句话要点
提出基于二维分解的高维配置空间方法,用于智能路口多车辆高效协同
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多车辆协同 轨迹规划 智能路口 高维配置空间 二维分解
📋 核心要点
- 现有方法在智能路口多车辆轨迹规划中,计算复杂度随车辆数量增加而显著提升,难以满足实时性要求。
- 该方法将高维轨迹规划问题分解为一系列二维图搜索问题,大幅降低计算复杂度,实现近优局部优化。
- 实验结果表明,该方法在目标值和计算时间上均优于基于MILP的时间调度方法,验证了其有效性。
📝 摘要(中文)
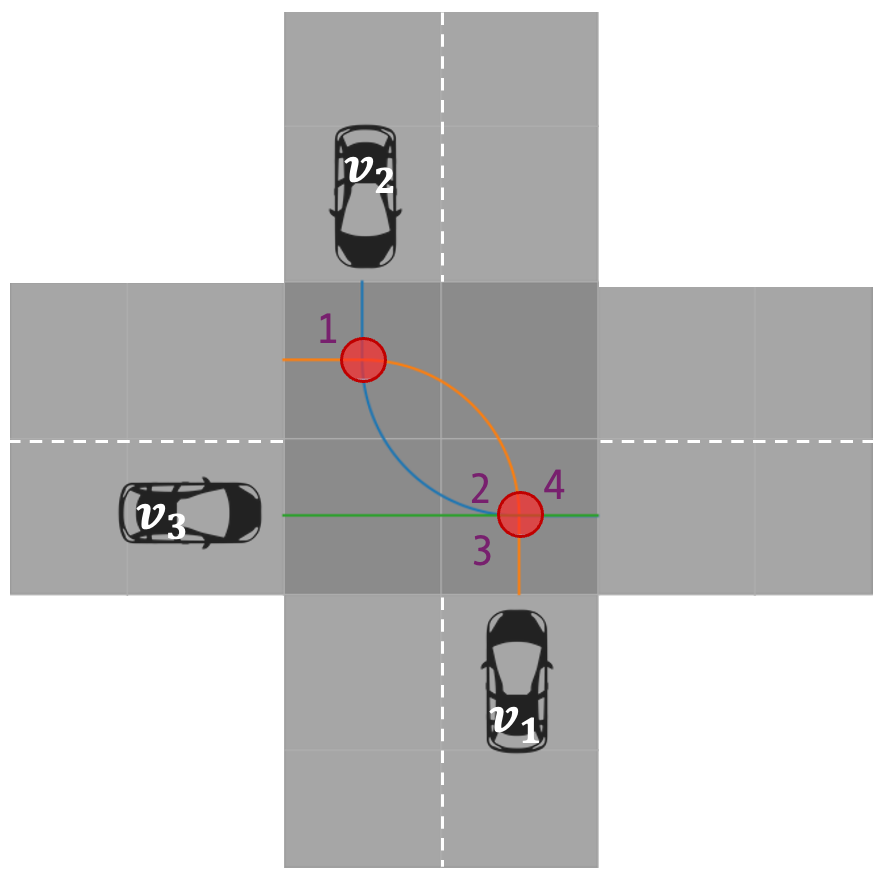
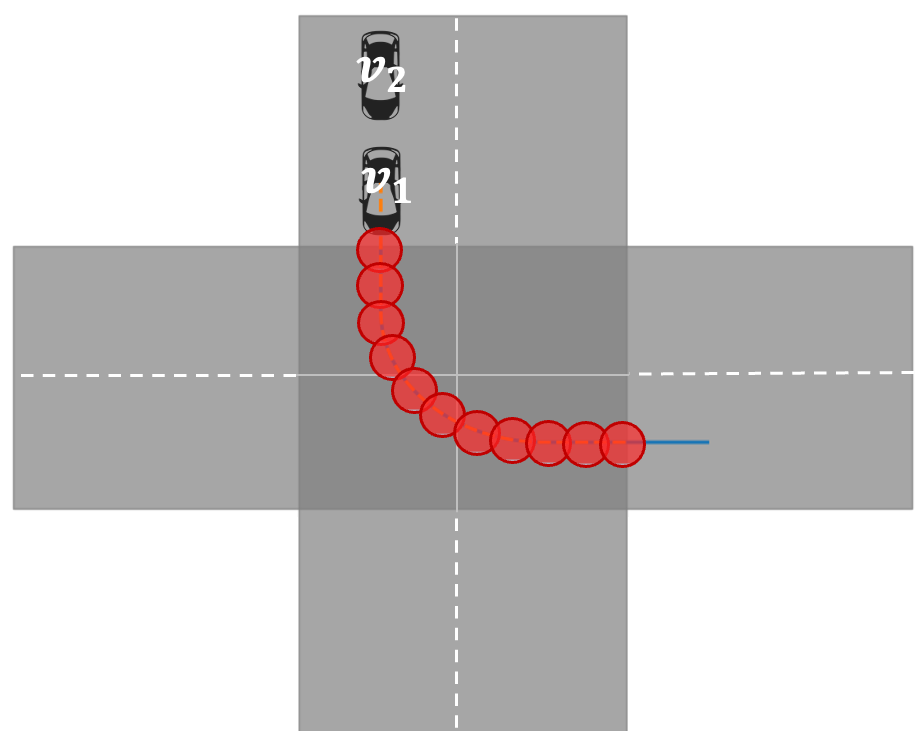
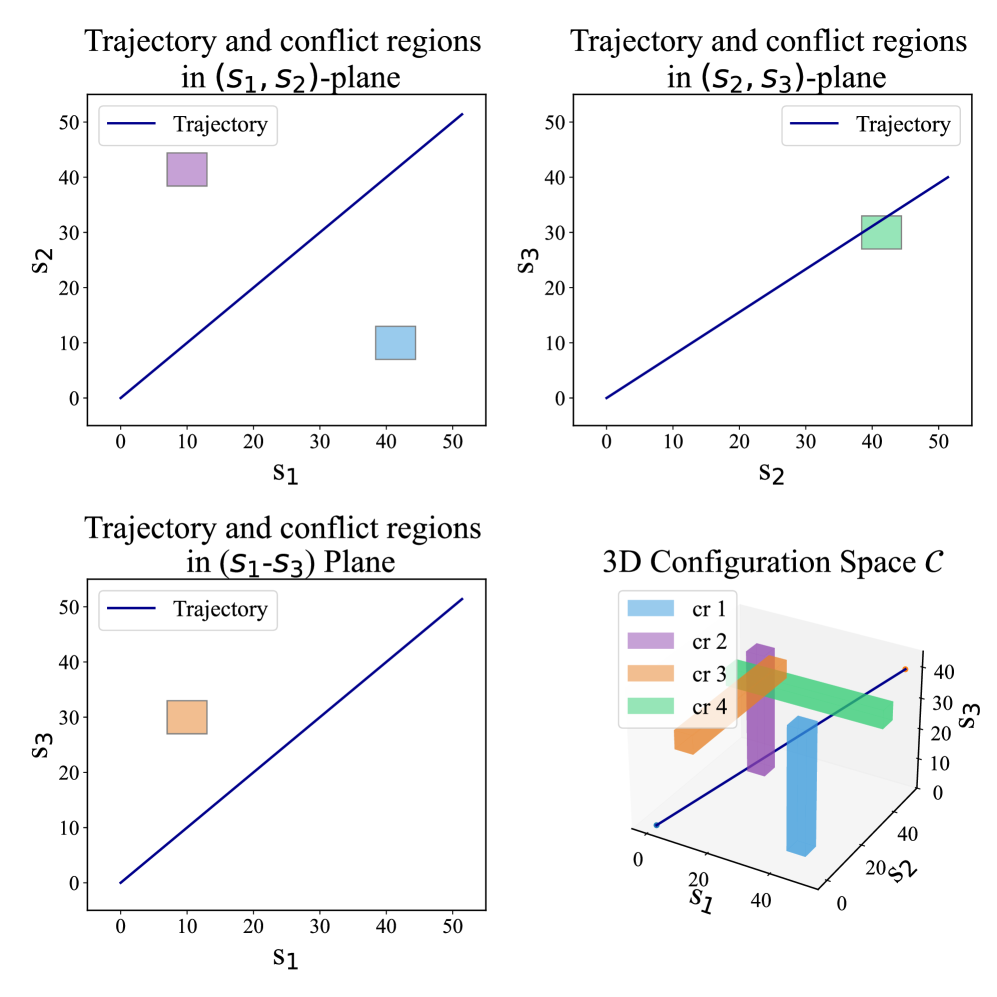
针对智能路口等共享空间中多车辆复杂交通场景下安全协同和轨迹规划面临的计算复杂性挑战,本文提出了一种计算高效的方法,用于生成沿预定义车辆路径的无碰撞轨迹。我们将约束最小时间轨迹规划问题重新表述为高维配置空间中的问题,其中冲突区域由二维矩形构建的高维多面体建模。然而,在这种公式中,随着涉及车辆数量的增加,计算复杂度显著增加。为了解决这个问题,我们提出了两种用于近优局部优化的算法,通过将高维问题分解为一系列二维图搜索问题,显著降低了计算复杂度。然后,将生成的轨迹整合到非线性模型预测控制(NMPC)框架中,以确保安全和平稳的车辆运动。此外,数值评估表明,该方法在目标值和计算时间方面均显著优于现有的基于MILP的时间调度方法。
🔬 方法详解
问题定义:论文旨在解决智能路口等多车辆共享空间中,由于计算复杂度高而导致的多车辆轨迹规划和安全协同问题。现有方法,如基于MILP的时间调度,在车辆数量增加时,计算量会急剧上升,难以满足实时性要求,限制了其在复杂交通场景中的应用。
核心思路:论文的核心思路是将高维配置空间中的轨迹规划问题分解为一系列二维图搜索问题。通过这种分解,可以将原本复杂的优化问题简化为多个易于求解的子问题,从而显著降低计算复杂度。这种分解的合理性在于,车辆之间的冲突通常发生在二维平面上,因此可以利用二维信息进行局部优化。
技术框架:整体框架包含以下几个主要步骤:1) 将约束最小时间轨迹规划问题转化为高维配置空间中的问题,其中冲突区域被建模为由二维矩形构建的高维多面体。2) 使用提出的两种算法将高维问题分解为一系列二维图搜索问题,进行近优局部优化,生成初始轨迹。3) 将生成的轨迹整合到非线性模型预测控制(NMPC)框架中,以进一步优化轨迹,确保车辆运动的安全性和平稳性。
关键创新:论文的关键创新在于提出了两种用于高维配置空间分解的算法,可以将复杂的多车辆轨迹规划问题分解为一系列二维图搜索问题。这种分解方法能够显著降低计算复杂度,使得在车辆数量较多的情况下也能实现快速的轨迹规划。与传统的基于MILP的方法相比,该方法避免了求解复杂的混合整数线性规划问题,从而提高了计算效率。
关键设计:论文中,高维配置空间由二维矩形构建的高维多面体建模,每个二维矩形代表一个冲突区域。两种分解算法的具体细节未知,但其核心思想是将高维问题分解为一系列二维图搜索问题。NMPC框架用于进一步优化轨迹,其目标函数和约束条件需要根据具体的车辆动力学模型和交通规则进行设计。具体的参数设置和损失函数等技术细节在论文中可能有所描述,但此处未知。
🖼️ 关键图片
📊 实验亮点
数值评估结果表明,该方法在目标值和计算时间方面均显著优于现有的基于MILP的时间调度方法。具体的性能提升数据未知,但结论表明该方法在解决多车辆轨迹规划问题上具有明显的优势,尤其是在计算效率方面。
🎯 应用场景
该研究成果可应用于智能交通系统、自动驾驶车辆以及无人机集群等领域。通过高效的轨迹规划和协同控制,可以提高交通效率、减少交通事故,并为未来的智能城市建设提供技术支持。该方法在物流配送、应急救援等场景中也具有潜在的应用价值。
📄 摘要(原文)
For multi-vehicle complex traffic scenarios in shared spaces such as intelligent intersections, safe coordination and trajectory planning is challenging due to computational complexity. To meet this challenge, we introduce a computationally efficient method for generating collision-free trajectories along predefined vehicle paths. We reformulate a constrained minimum-time trajectory planning problem as a problem in a high-dimensional configuration space, where conflict zones are modeled by high-dimensional polyhedra constructed from two-dimensional rectangles. Still, in such a formulation, as the number of vehicles involved increases, the computational complexity increases significantly. To address this, we propose two algorithms for near-optimal local optimization that significantly reduce the computational complexity by decomposing the high-dimensional problem into a sequence of 2D graph search problems. The resulting trajectories are then incorporated into a Nonlinear Model Predictive Control (NMPC) framework to ensure safe and smooth vehicle motion. We furthermore show in numerical evaluation that this approach significantly outperforms existing MILP-based time-scheduling; both in terms of objective-value and computational time.