A Robust Model Predictive Control Method for Networked Control Systems
作者: Severin Beger, Sandra Hirche
分类: eess.SY
发布日期: 2025-12-12
备注: Accepted for publication in the Proceedings of the 63rd IEEE Conference on Decision and Control
期刊: 2024 IEEE 63rd Conference on Decision and Control (CDC), Milan, Italy, 2024, pp. 6896-6903
DOI: 10.1109/CDC56724.2024.10886340
💡 一句话要点
提出一种鲁棒模型预测控制方法,用于解决网络控制系统中的时延和丢包问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 网络控制系统 模型预测控制 鲁棒控制 时延补偿 丢包补偿
📋 核心要点
- 网络控制系统面临时延和丢包等挑战,传统方法难以保证控制性能的鲁棒性。
- 论文提出预测一致性方法,增强控制系统对网络约束的适应性,保持原有模型预测控制的特性。
- 通过倒立摆和连续搅拌釜式反应器的仿真,验证了该方法在时延和丢包环境下的有效性和鲁棒性。
📝 摘要(中文)
在网络控制系统中,鲁棒地补偿网络约束(如时延和丢包)对于远程控制动态系统至关重要。本文提出了一种新颖的预测一致性方法,以应对UDP类型通信系统中遇到的时延和丢包问题。增强后的控制系统在网络约束下保留了原始模型预测控制方法的所有属性。此外,我们建议将线性管模型预测控制与该新方法结合使用,并表明在温和条件下,系统能够鲁棒地收敛到原点。我们通过倒立摆和连续搅拌釜式反应器的仿真实例对此进行了说明。
🔬 方法详解
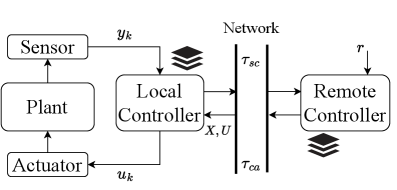
问题定义:网络控制系统(NCS)中,由于通信网络引入的时延和数据包丢失,传统的控制方法难以保证系统的稳定性和性能。现有方法通常假设网络状况良好,或者对网络约束的处理不够鲁棒,导致控制效果下降甚至系统失稳。因此,需要一种能够有效补偿网络约束,保证系统鲁棒性的控制方法。
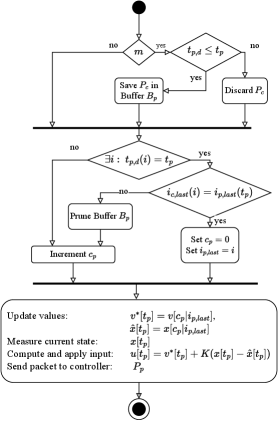
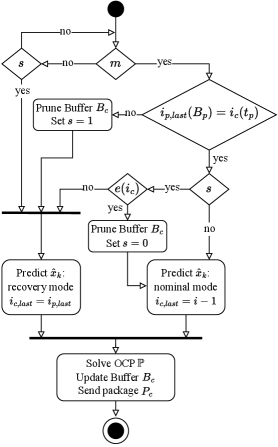
核心思路:论文的核心思路是提出一种“预测一致性”方法,该方法通过在模型预测控制(MPC)框架内,对未来的网络约束进行预测,并使控制器的预测与实际的网络行为保持一致。这样,控制器可以提前对网络约束做出补偿,从而提高系统的鲁棒性。
技术框架:该方法首先建立一个增强的控制系统模型,该模型包含了网络约束的影响。然后,利用模型预测控制(MPC)算法,在每个控制周期内,根据当前状态和对未来网络约束的预测,计算出一个最优的控制序列。最后,将控制序列的第一个元素作用于被控对象。为了进一步提高鲁棒性,论文还结合了线性管模型预测控制(Tube MPC)方法。
关键创新:该方法最重要的创新点在于“预测一致性”的思想。传统的MPC方法通常假设网络约束是已知的或者可以忽略的,而该方法则显式地考虑了网络约束的影响,并通过预测一致性来提高系统的鲁棒性。此外,将预测一致性方法与线性管模型预测控制相结合,进一步增强了系统的鲁棒性。
关键设计:论文的关键设计包括:1) 增强的控制系统模型,该模型需要准确地描述网络约束对系统的影响;2) 网络约束的预测方法,需要能够准确地预测未来的网络行为;3) 模型预测控制算法,需要能够有效地利用预测信息,计算出最优的控制序列;4) 线性管模型预测控制器的设计,需要保证系统的稳定性和鲁棒性。
🖼️ 关键图片
📊 实验亮点
论文通过倒立摆和连续搅拌釜式反应器的仿真实验验证了所提出方法的有效性。仿真结果表明,该方法能够在存在时延和丢包的网络环境下,有效地控制系统,并保证系统的稳定性和鲁棒性。与传统的MPC方法相比,该方法能够显著提高系统的控制性能,例如更快的响应速度和更小的稳态误差。具体的性能提升数据在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于各种需要远程控制的动态系统,例如远程机器人、智能电网、分布式控制系统等。在这些应用中,网络通信是必不可少的,但同时也带来了时延和丢包等问题。该方法可以有效地解决这些问题,提高系统的控制性能和鲁棒性,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Robustly compensating network constraints such as delays and packet dropouts in networked control systems is crucial for remotely controlling dynamical systems. This work proposes a novel prediction consistent method to cope with delays and packet losses as encountered in UDP-type communication systems. The augmented control system preserves all properties of the original model predictive control method under the network constraints. Furthermore, we propose to use linear tube MPC with the novel method and show that the system converges robustly to the origin under mild conditions. We illustrate this with simulation examples of a cart pole and a continuous stirred tank reactor.