Distribution-Free Stochastic MPC for Joint-in-Time Chance-Constrained Linear Systems
作者: Lukas Vogel, Andrea Carron, Eleftherios E. Vlahakis, Dimos V. Dimarogonas
分类: eess.SY, cs.RO
发布日期: 2025-12-11
💡 一句话要点
提出一种基于Conformal Prediction的分布无关随机MPC方法,用于解决时域联合概率约束线性系统控制问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 随机模型预测控制 Conformal Prediction 概率约束 分布无关 线性系统
📋 核心要点
- 现有随机MPC方法依赖于对扰动分布的假设或需要大量的离线计算,限制了其在实际系统中的应用。
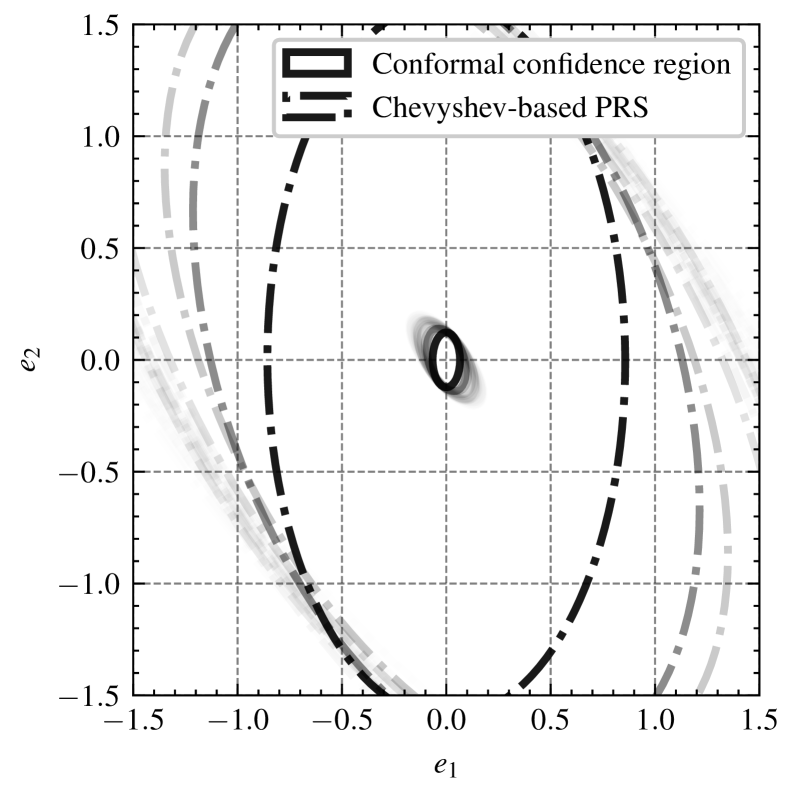
- 该论文利用Conformal Prediction构建误差轨迹的置信区域,从而在无需分布假设的情况下,松弛概率约束并提供形式保证。
- 通过数值实验验证了该方法在满足概率约束和保证系统稳定性的有效性,并展示了其优于现有方法的性能。
📝 摘要(中文)
本文提出了一种针对线性系统的随机模型预测控制(MPC)框架,该系统受到未知扰动分布下的时域联合概率约束。与依赖参数或高斯假设或需要昂贵离线计算的现有随机MPC公式不同,该方法利用Conformal Prediction(CP)作为一种简化的工具,以最小的计算量构建系统随机误差轨迹的有限样本置信区域。这些区域能够在提供形式保证的同时放宽概率约束。通过采用间接反馈机制和基于概率集合的公式,我们证明了松弛优化问题的递归可行性,并建立了闭环中的概率约束满足性。此外,我们将该方法扩展到具有未知测量噪声分布的更一般的输出反馈设置。给定可用的噪声样本,我们仅通过输出测量来建立联合概率约束的满足性和递归可行性。数值例子证明了该方法相对于现有方法的有效性和优势。
🔬 方法详解
问题定义:论文旨在解决线性系统在未知扰动分布下,满足时域联合概率约束的随机模型预测控制问题。现有方法通常需要对扰动分布进行参数假设(如高斯分布),或者需要进行大量的离线计算来近似概率约束,这限制了它们在实际应用中的适用性。此外,保证闭环系统的递归可行性和概率约束满足性也是一个挑战。
核心思路:论文的核心思路是利用Conformal Prediction (CP) 这一无分布假设的预测方法,为系统的随机误差轨迹构建有限样本置信区域。通过这些置信区域,可以将原有的概率约束转化为确定性约束,从而避免了对扰动分布的直接估计或假设。同时,采用间接反馈机制和概率集合方法,保证了闭环系统的递归可行性和概率约束满足性。
技术框架:该方法主要包含以下几个阶段:1) 利用历史数据,通过Conformal Prediction构建系统误差轨迹的置信区域;2) 将原有的时域联合概率约束转化为基于置信区域的确定性约束,得到一个松弛的优化问题;3) 求解该优化问题,得到控制输入序列;4) 将控制输入作用于系统,并利用间接反馈机制更新状态;5) 重复以上步骤,实现闭环控制。对于输出反馈的情况,则需要额外考虑测量噪声的影响,并利用Conformal Prediction对测量噪声进行建模。
关键创新:该论文最重要的技术创新在于将Conformal Prediction引入到随机MPC框架中,从而实现了分布无关的概率约束处理。与现有方法相比,该方法无需对扰动分布进行假设,也无需进行大量的离线计算,具有更高的适用性和计算效率。此外,该论文还提出了间接反馈机制和概率集合方法,保证了闭环系统的递归可行性和概率约束满足性。
关键设计:关键设计包括:1) Conformal Prediction方法的选择和参数设置,例如置信水平的选择会影响置信区域的大小和概率约束的满足程度;2) 间接反馈机制的设计,需要保证状态的有效更新;3) 优化问题的构建,需要合理地平衡控制性能和约束满足性;4) 对于输出反馈的情况,需要合理地处理测量噪声的影响,例如可以采用卡尔曼滤波等方法进行噪声抑制。
🖼️ 关键图片
📊 实验亮点
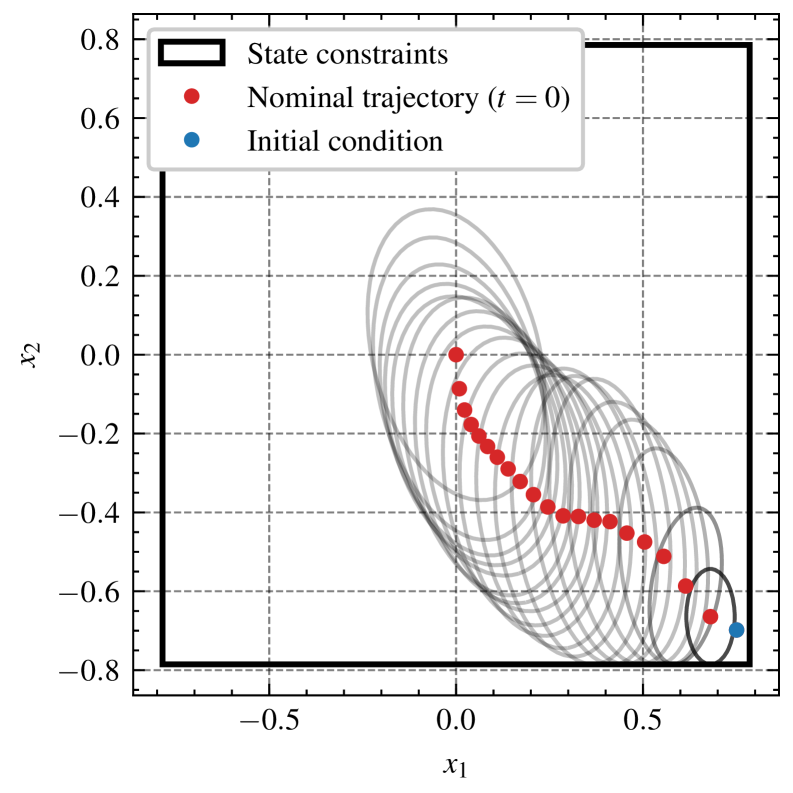
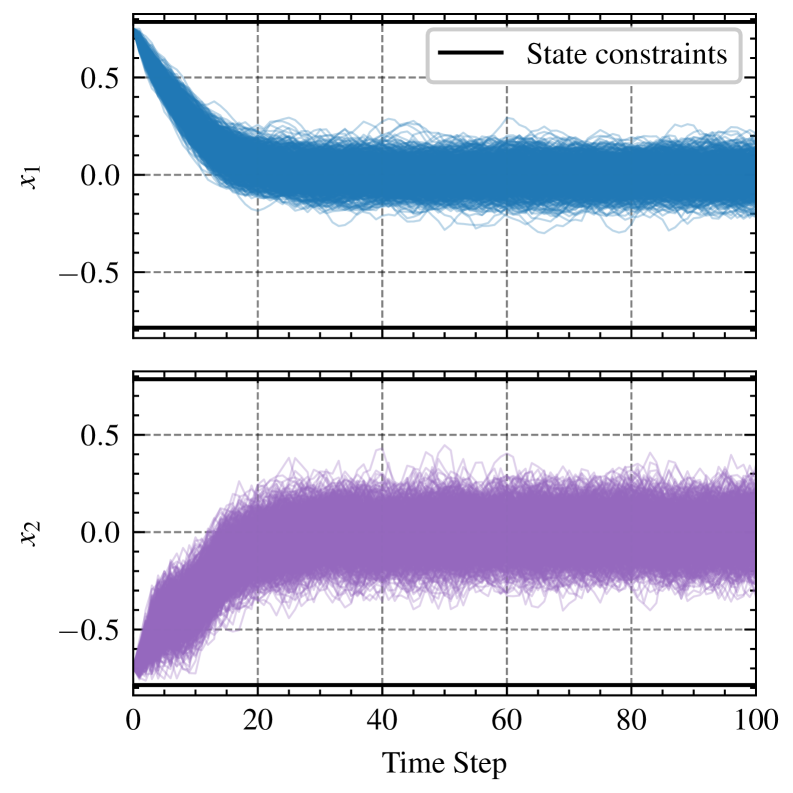
数值实验表明,该方法能够在满足给定的时域联合概率约束的同时,实现良好的控制性能。与传统的基于高斯假设的随机MPC方法相比,该方法在扰动分布未知的情况下,能够更好地满足概率约束,并具有更强的鲁棒性。此外,该方法所需的计算量也相对较小,更适用于在线控制。
🎯 应用场景
该研究成果可应用于各种需要考虑不确定性和概率约束的控制场景,例如机器人导航、自动驾驶、电力系统控制、金融风险管理等。特别是在扰动分布未知或难以精确建模的情况下,该方法具有显著的优势。该方法能够提高系统的鲁棒性和可靠性,降低风险,并为实际应用提供更强的保障。
📄 摘要(原文)
This work presents a stochastic model predictive control (MPC) framework for linear systems subject to joint-in-time chance constraints under unknown disturbance distributions. Unlike existing stochastic MPC formulations that rely on parametric or Gaussian assumptions or require expensive offline computations, the proposed method leverages conformal prediction (CP) as a streamlined tool to construct finite-sample confidence regions for the system's stochastic error trajectories with minimal computational effort. These regions enable the relaxation of probabilistic constraints while providing formal guarantees. By employing an indirect feedback mechanism and a probabilistic set-based formulation, we prove recursive feasibility of the relaxed optimization problem and establish chance constraint satisfaction in closed-loop. Furthermore, we extend the approach to the more general output feedback setting with unknown measurement noise distributions. Given available noise samples, we establish satisfaction of the joint chance constraints and recursive feasibility via output measurements alone. Numerical examples demonstrate the effectiveness and advantages of the proposed method compared to existing approaches.