Traffic Equilibrium in Mixed-Autonomy Network with Capped Customer Waiting
作者: Jiaxin Hou, Kexin Wang, Ruolin Li, Jong-shi Pang
分类: eess.SY
发布日期: 2025-12-11
备注: under review for journal
💡 一句话要点
提出混合自动驾驶网络交通均衡模型,考虑出行者等待时间限制与车队运营策略。
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 交通均衡 混合自动驾驶网络 网约车 自动驾驶车辆 出行选择 等待时间 变分不等式
📋 核心要点
- 现有交通模型难以同时考虑网约车公司运营策略、出行者选择行为和混合交通流的影响。
- 构建包含网约车公司运营、出行者选择、等待时间限制和交通拥堵的统一框架,建模混合自动驾驶网络交通均衡。
- 数值实验分析了自动驾驶渗透率和路线偏离对系统性能的影响,为政策制定提供参考。
📝 摘要(中文)
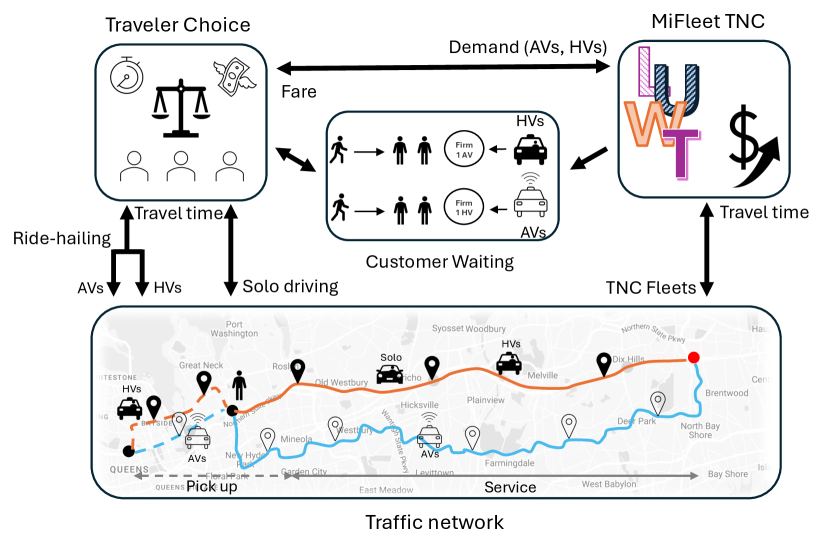
本文构建了一个统一的建模框架,用于捕捉混合自动驾驶交通网络中,网约车公司、出行者和交通之间的均衡状态交互。该框架集成了四个相互关联的子模块:(i)代表性的混合车队交通网络公司(MiFleet TNCs)管理自动驾驶汽车(AV)和人工驾驶汽车(HV)车队的操作行为;(ii)出行者考虑出行成本和等待时间做出的出行方式选择决策;(iii)有上限的客户等待时间,反映了出行者在超过其耐心后选择不等待TNC服务并转向现有出行方式的选项;(iv)用于计算出行时间的流量依赖型交通拥堵模型。一个关键的建模特征区分了AV和HV在接送和提供服务(乘客在车上)阶段的行为:AV遵循Wardrop接送路线,但在公司协调下,可以在服务期间偏离路线,而HV则以相反的方式运作。整个框架被表述为一个非线性互补问题(NCP),它等价于一个变分不等式(VI)公式,基于此,建立了交通模型变分均衡解的存在性。数值实验检验了AV渗透率和Wardrop松弛因子(约束路线偏离)如何不同程度地影响公司、出行者和系统性能。结果为政策制定者提供了可操作的见解,以规范现代交通系统中AV的采用和公司车辆的偏离行为,这些系统由于技术和信息可访问性的进步而快速变化。
🔬 方法详解
问题定义:论文旨在解决混合自动驾驶网络下的交通均衡问题,现有方法通常难以将网约车公司的运营策略(包括自动驾驶车辆和人工驾驶车辆的混合车队管理)、出行者的出行方式选择行为(考虑出行成本和等待时间)以及交通拥堵情况进行统一建模。此外,出行者的等待时间是有上限的,超过一定时间会放弃网约车服务,这也需要被考虑进模型中。
核心思路:论文的核心思路是将整个交通系统建模为一个非线性互补问题(NCP),并将其转化为等价的变分不等式(VI)问题。通过求解该VI问题,可以得到交通网络的均衡状态,包括车辆的流量分布、出行者的出行方式选择以及网约车公司的运营策略。这种方法能够有效地将不同参与者的行为整合到一个统一的框架中。
技术框架:该框架包含四个主要模块:(1) 混合车队交通网络公司(MiFleet TNCs)的运营行为建模,考虑自动驾驶车辆(AV)和人工驾驶车辆(HV)的车队管理;(2) 出行者出行方式选择决策建模,考虑出行成本和等待时间;(3) 客户等待时间上限建模,反映出行者对等待时间的容忍度;(4) 流量依赖型交通拥堵模型,用于计算出行时间。这些模块相互关联,共同构成一个完整的交通网络模型。
关键创新:论文的关键创新在于区分了AV和HV在接送和提供服务阶段的行为。AV在接送阶段遵循Wardrop均衡路线,但在服务阶段可以根据公司协调偏离路线,而HV则以相反的方式运作。这种差异化的建模方式更符合实际情况,并能够更准确地反映混合自动驾驶网络下的交通状况。
关键设计:论文使用Wardrop松弛因子来约束AV在服务阶段的路线偏离程度。该因子控制了AV偏离Wardrop均衡路线的范围,从而影响整个交通网络的均衡状态。此外,论文还考虑了出行者的等待时间上限,当等待时间超过上限时,出行者将选择其他出行方式。这些关键设计使得模型更加贴近实际,并能够更准确地预测交通网络的行为。
🖼️ 关键图片

📊 实验亮点
数值实验表明,自动驾驶车辆的渗透率和Wardrop松弛因子对公司、出行者和系统性能产生不同程度的影响。例如,适当增加自动驾驶车辆的渗透率可以降低出行者的平均等待时间,但过高的渗透率可能会导致交通拥堵加剧。此外,限制自动驾驶车辆的路线偏离行为可以提高交通效率,但也会降低网约车公司的运营灵活性。
🎯 应用场景
该研究成果可应用于城市交通规划、网约车平台运营优化和自动驾驶车辆政策制定等领域。通过模拟不同自动驾驶车辆渗透率和运营策略下的交通状况,可以为政府和企业提供决策支持,从而提高交通效率、降低拥堵和改善出行体验。此外,该模型还可以用于评估不同交通政策对出行者行为的影响。
📄 摘要(原文)
This paper develops a unified modeling framework to capture the equilibrium-state interactions among ride-hailing companies, travelers, and traffic of mixed-autonomy transportation networks. Our framework integrates four interrelated sub-modules: (i) the operational behavior of representative ride-hailing Mixed-Fleet Traffic Network Companies (MiFleet TNCs) managing autonomous vehicle (AV) and human-driven vehicle (HV) fleets, (ii) traveler mode-choice decisions taking into account travel costs and waiting time, (iii) capped customer waiting times to reflect the option available to travelers not to wait for TNCs' service beyond his/her patience and to resort to existing travel modes, and (iv) a flow-dependent traffic congestion model for travel times. A key modeling feature distinguishes AVs and HVs across the pickup and service (customer-on-board) stages: AVs follow Wardrop pickup routes but may deviate during service under company coordination, whereas HVs operate in the reverse manner. The overall framework is formulated as a Nonlinear Complementarity Problem (NCP), which is equivalent to a Variational Inequality(VI) formulation based on which the existence of a variational equilibrium solution to the traffic model is established. Numerical experiments examine how AV penetration and Wardrop relaxation factors, which bound route deviation, affect company, traveler, and system performance to various degrees. The results provide actionable insights for policymakers on regulating AV adoption and company vehicle deviation behavior in modern-day traffic systems that are fast changing due to the advances in technology and information accessibility.