MPC for momentum counter-balanced and zero-impulse contact with a free-spinning satellite
作者: Theofania Karampela, Rishie Seshadri, Florian Dörfler, Sarah H. Q. Li
分类: eess.SY, cs.RO
发布日期: 2025-12-10
备注: 21 pages, 4 figures, 5 tables, submission for AIAA SciTech 2026 conference
💡 一句话要点
提出基于MPC的控制框架,实现服务卫星与自由旋转目标卫星的零冲量接触
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 模型预测控制 在轨服务 零冲量接触 卫星控制 空间机器人
📋 核心要点
- 在轨服务任务中,服务卫星与自由旋转目标卫星的接触能力至关重要,现有方法难以同时满足驱动和状态约束。
- 论文提出基于非线性模型预测控制(MPC)的框架,显式建模服务卫星力矩生成模块和操作模块之间的交叉耦合动力学。
- 通过蒙特卡罗仿真验证了MPC控制器在维持自旋同步和零冲量接触方面的有效性,并对比了现有控制方法的性能。
📝 摘要(中文)
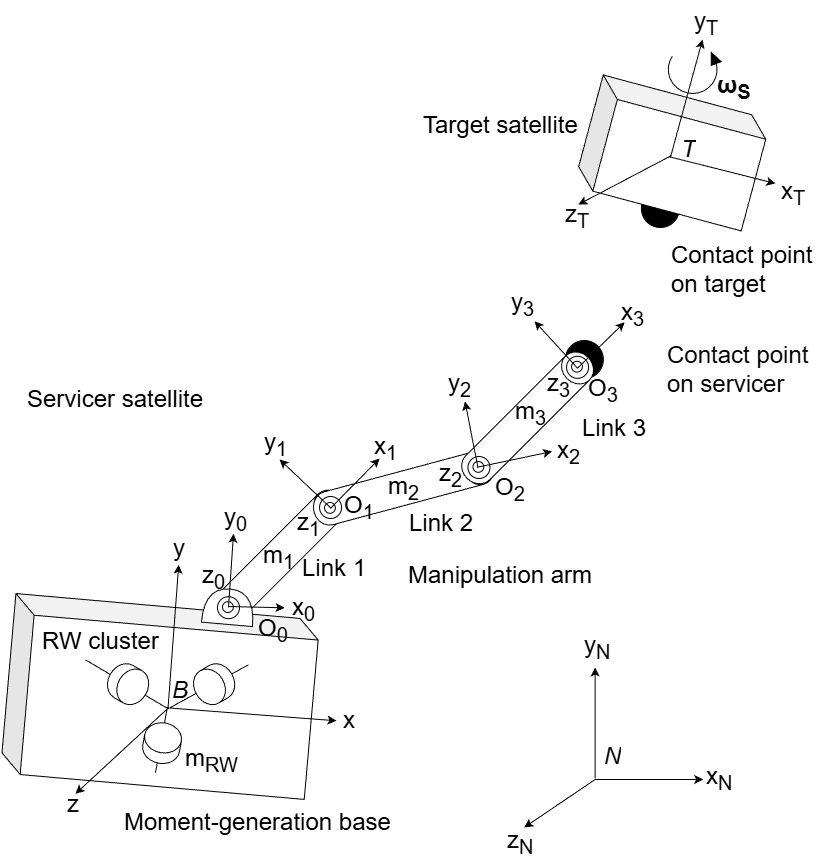
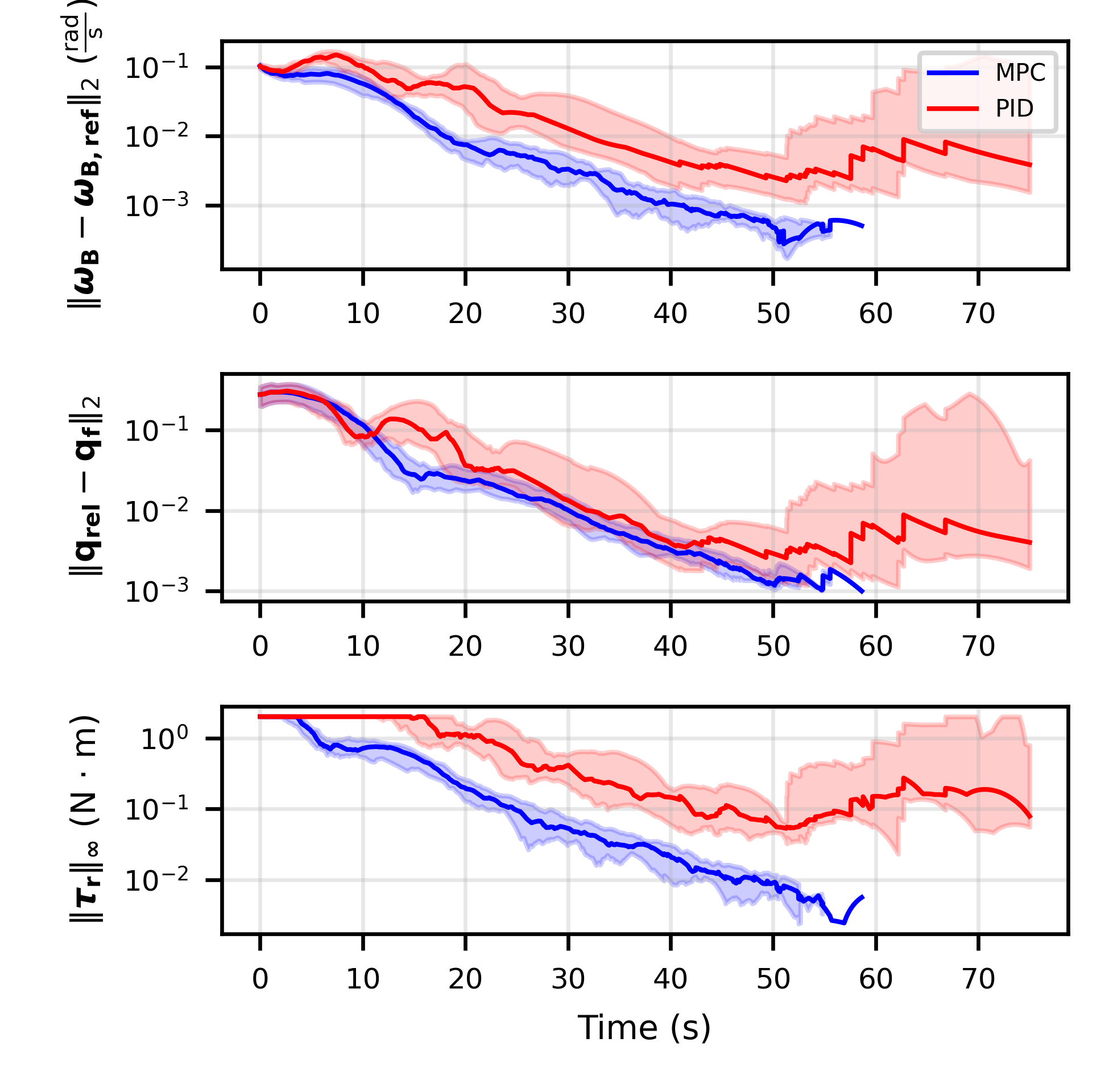
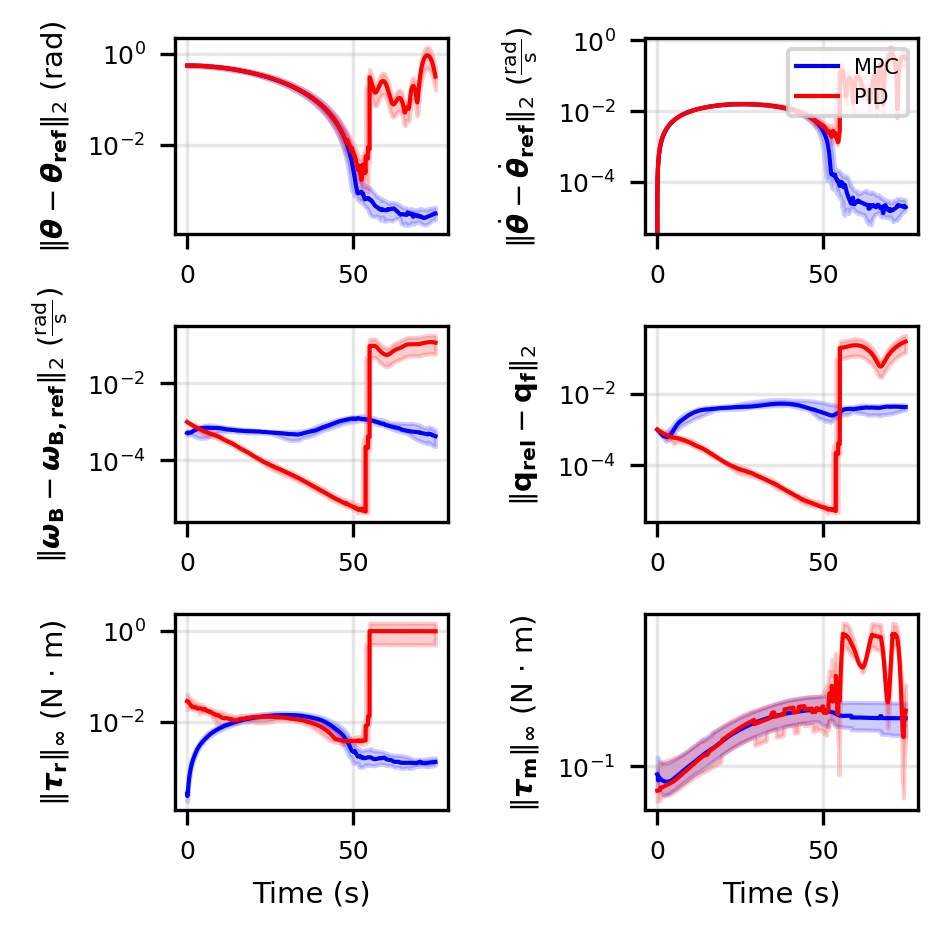
本文提出了一种非线性模型预测控制(MPC)框架,用于生成服务卫星的可行控制策略,以实现与自由旋转目标卫星的零冲量接触。该操作需要服务卫星的两个独立驱动模块之间的协调:(1)力矩生成模块和(2)操作模块。我们应用MPC来控制这两个模块,并显式地建模了它们之间的交叉耦合动力学。实验证明,MPC控制器可以强制执行先前控制方法无法考虑的驱动和状态约束。通过数值蒙特卡罗(MC)试验模拟与自由旋转目标卫星的零冲量接触场景,并将仿真结果与先前的控制方法进行比较,评估了MPC控制器的性能。仿真结果验证了MPC控制器在操作约束、移动接触位置以及观测和驱动噪声下,维持自旋同步和零冲量接触的有效性。
🔬 方法详解
问题定义:论文旨在解决服务卫星与自由旋转目标卫星进行零冲量接触的问题。现有控制方法难以同时考虑驱动和状态约束,无法保证接触过程的安全性与精度。此外,服务卫星的两个模块(力矩生成和操作模块)之间的耦合动力学也增加了控制的复杂性。
核心思路:论文的核心思路是利用模型预测控制(MPC)的优势,通过预测未来状态并优化控制输入,显式地考虑系统约束和模块间的耦合动力学。MPC能够根据当前状态和系统模型,预测未来一段时间内的状态轨迹,并选择最优的控制序列,从而实现精确的零冲量接触。
技术框架:整体框架包括以下几个主要部分:1) 建立服务卫星和目标卫星的动力学模型,包括两个模块的运动学和动力学方程,以及它们之间的耦合关系。2) 设计MPC控制器,包括定义状态变量、控制输入、约束条件和目标函数。3) 使用数值优化算法求解MPC问题,得到最优的控制序列。4) 将控制序列应用于服务卫星,实现与目标卫星的零冲量接触。
关键创新:论文的关键创新在于将MPC应用于服务卫星的零冲量接触问题,并显式地建模了两个模块之间的交叉耦合动力学。与传统的控制方法相比,MPC能够更好地处理系统约束和非线性特性,从而提高控制的精度和鲁棒性。此外,论文还通过蒙特卡罗仿真验证了MPC控制器的有效性。
关键设计:MPC控制器的关键设计包括:1) 状态变量的选择,包括服务卫星和目标卫星的位置、姿态、速度和角速度。2) 控制输入的选择,包括力矩生成模块和操作模块的驱动力矩。3) 约束条件的定义,包括驱动力矩的上下限、状态变量的上下限,以及接触时的零冲量条件。4) 目标函数的定义,通常包括跟踪误差的最小化和控制输入的最小化。5) 优化算法的选择,例如序列二次规划(SQP)或内点法。
🖼️ 关键图片
📊 实验亮点
通过蒙特卡罗仿真,验证了所提出的MPC控制器在存在观测和驱动噪声的情况下,仍能有效维持自旋同步和零冲量接触。仿真结果表明,该MPC控制器能够满足操作约束,并适应移动的接触位置,性能优于先前的控制方法。具体性能数据(如接触误差、控制精度等)未在摘要中明确给出,属于未知信息。
🎯 应用场景
该研究成果可应用于在轨服务、空间碎片清除、卫星捕获等领域。通过精确控制服务卫星与目标卫星的接触过程,可以安全有效地完成各种在轨操作,降低任务风险,提高任务效率。未来,该技术有望推广到更复杂的空间机器人任务中,例如在轨组装、维修和升级等。
📄 摘要(原文)
In on-orbit robotics, a servicer satellite's ability to make contact with a free-spinning target satellite is essential to completing most on-orbit servicing (OOS) tasks. This manuscript develops a nonlinear model predictive control (MPC) framework that generates feasible controls for a servicer satellite to achieve zero-impulse contact with a free-spinning target satellite. The overall maneuver requires coordination between two separately actuated modules of the servicer satellite: (1) a moment generation module and (2) a manipulation module. We apply MPC to control both modules by explicitly modeling the cross-coupling dynamics between them. We demonstrate that the MPC controller can enforce actuation and state constraints that prior control approaches could not account for. We evaluate the performance of the MPC controller by simulating zero-impulse contact scenarios with a free-spinning target satellite via numerical Monte Carlo (MC) trials and comparing the simulation results with prior control approaches. Our simulation results validate the effectiveness of the MPC controller in maintaining spin synchronization and zero-impulse contact under operation constraints, moving contact location, and observation and actuation noise.