Beyond Wave Variables: A Data-Driven Ensemble Approach for Enhanced Teleoperation Transparency and Stability
作者: Nour Mitiche, Farid Ferguene, Mourad Oussalah
分类: eess.SY, cs.LG
发布日期: 2025-12-09
备注: 14 pages, 8 figures, 5 tables
💡 一句话要点
提出数据驱动的集成模型,提升远程操作系统的透明性和稳定性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 远程操作 数据驱动 集成学习 序列模型 透明性 稳定性 通信延迟 无源性
📋 核心要点
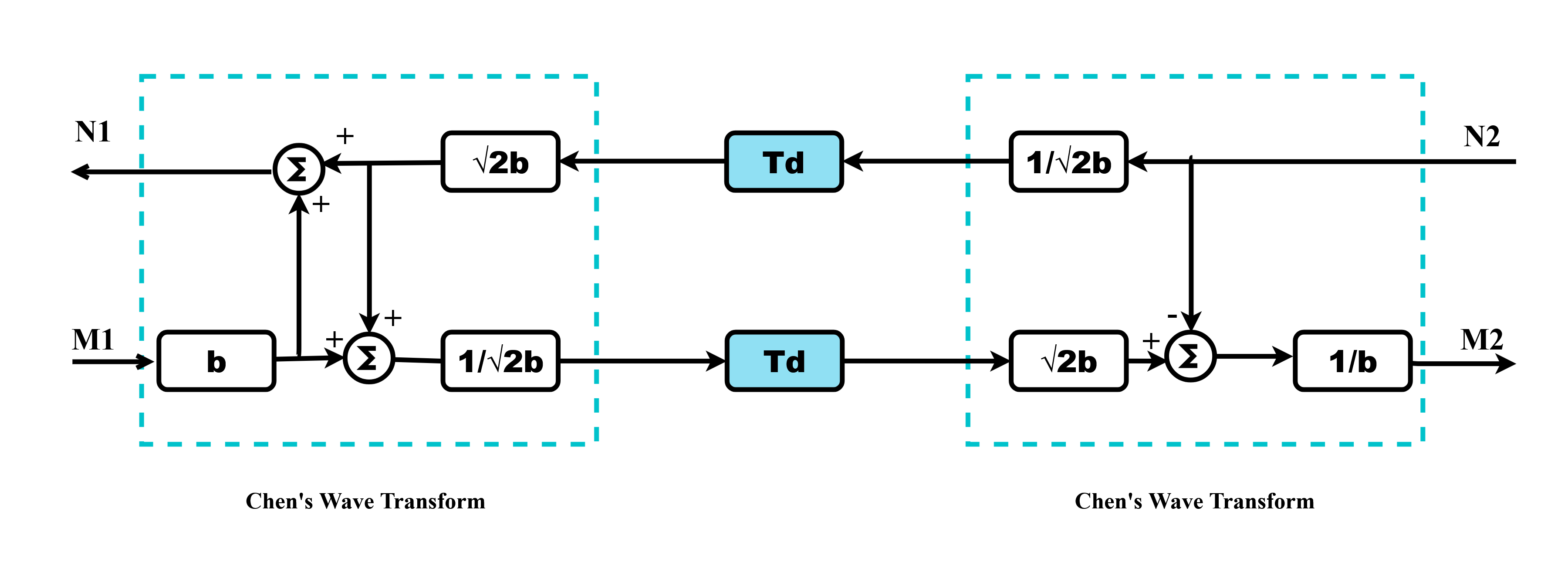
- 远程操作中通信延迟导致透明性和稳定性问题,传统波变量方法易受噪声和延迟变化影响。
- 采用数据驱动的集成方法,用序列模型集成替代波变量变换,并通过元学习器组合。
- 实验结果表明,该集成模型在保证稳定性的同时,实现了与传统方法相当的透明度。
📝 摘要(中文)
通信信道中的时间延迟是双边远程操作系统面临的重大挑战,会影响系统的透明性和稳定性。传统的基于波变量的四通道架构方法虽然能通过保证无源性来确保稳定性,但仍然容易受到波反射以及可变延迟和环境噪声等干扰的影响。本文提出了一种数据驱动的混合框架,该框架用三个先进的序列模型的集成取代了传统的波变量变换。每个模型都通过最先进的Optuna优化器进行单独优化,并通过堆叠元学习器进行组合。基础预测器包括:一个用Prophet增强的LSTM用于趋势校正;一个基于LSTM的特征提取器,与聚类和随机森林配对,以改进回归;以及一个用于局部和长期动态的CNN-LSTM模型。实验验证是在Python中使用从MATLAB/Simulink中实现的基线系统生成的数据进行的。结果表明,我们优化的集成模型在不同的延迟和噪声下实现了与基线波变量系统相当的透明度,同时通过无源性约束确保了稳定性。
🔬 方法详解
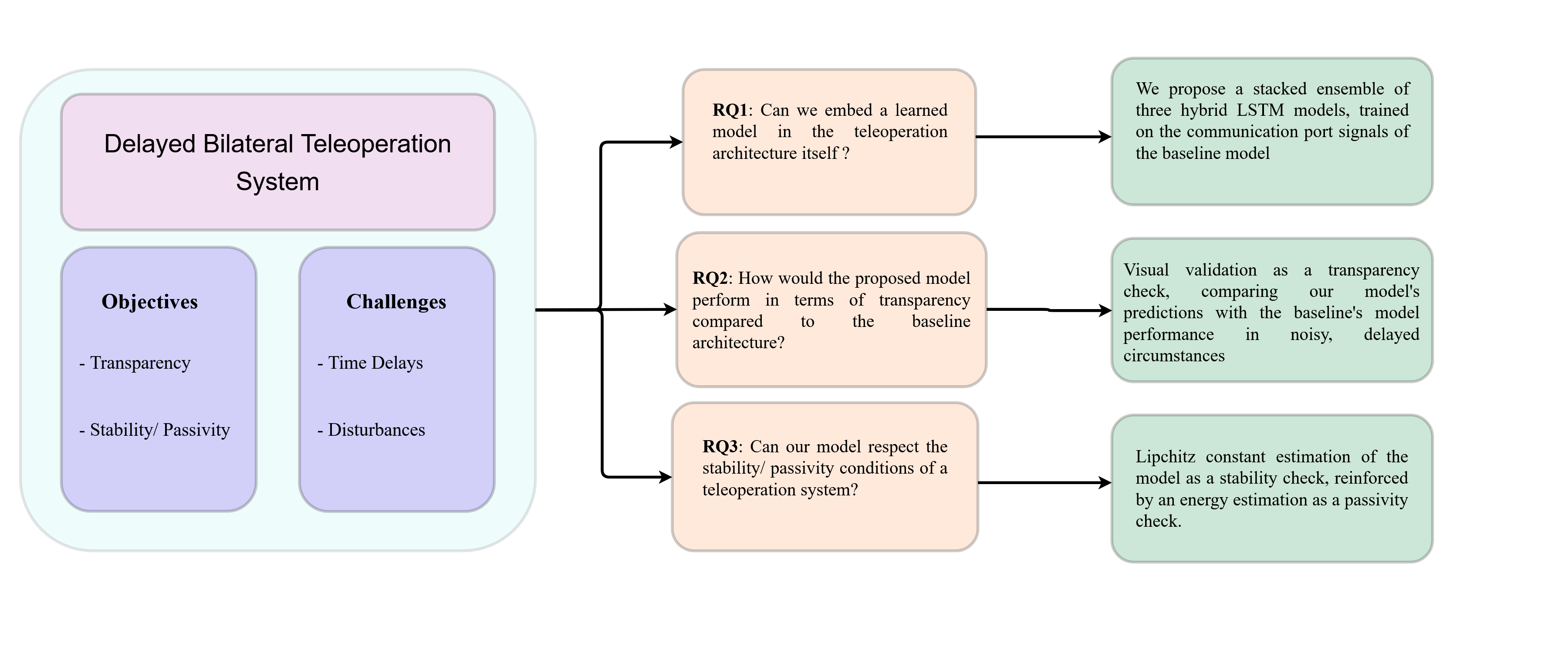
问题定义:远程操作系统的通信延迟会严重影响系统的透明性和稳定性。传统的基于波变量的方法虽然可以通过保证系统的无源性来确保稳定性,但是对于实际应用中存在的波反射、可变延迟以及环境噪声等干扰非常敏感,导致性能下降。
核心思路:论文的核心思路是利用数据驱动的方法,构建一个能够学习和预测系统动态的集成模型,从而替代传统的波变量变换。通过这种方式,系统可以更好地适应各种干扰,提高透明性和稳定性。该方法旨在利用机器学习模型强大的非线性建模能力,克服传统方法的局限性。
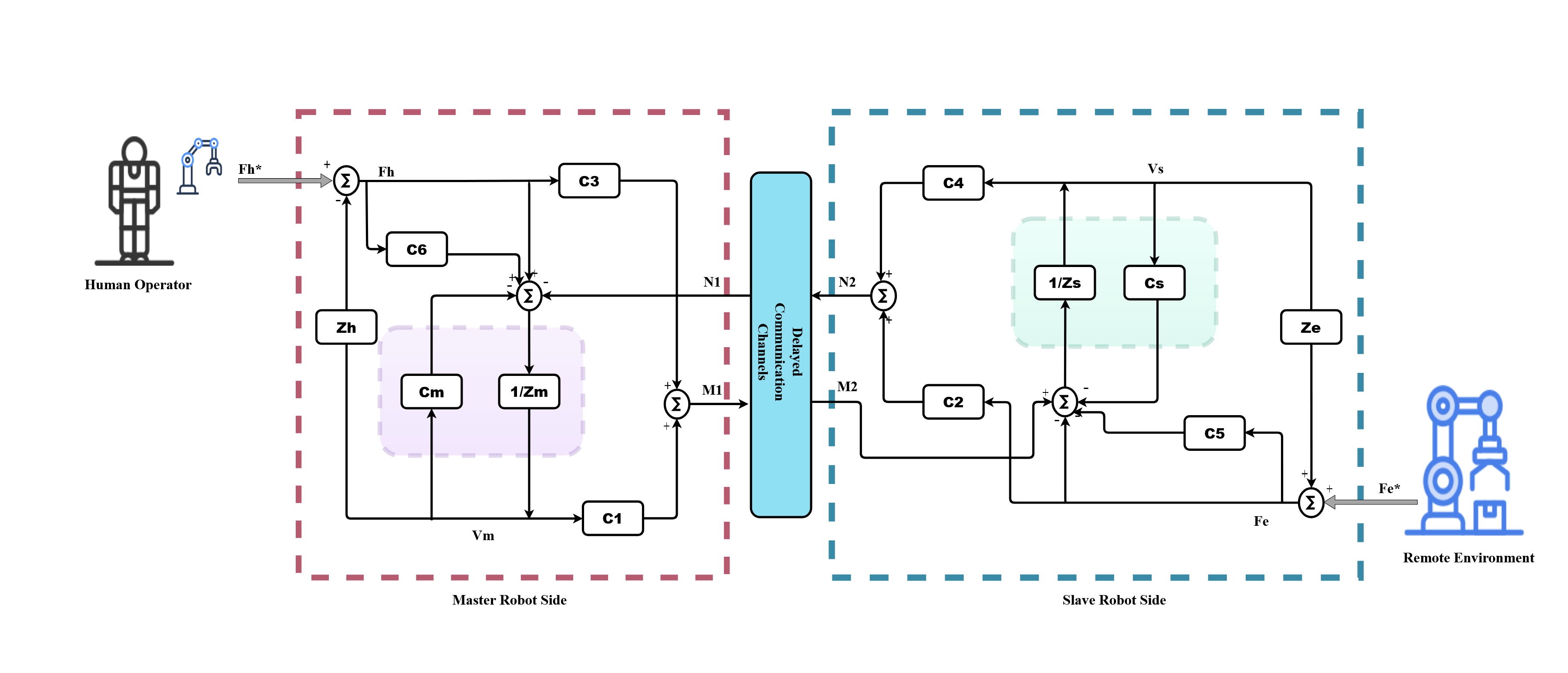
技术框架:该框架主要包含以下几个模块:1) 数据生成模块:使用MATLAB/Simulink搭建基线系统,生成训练数据。2) 基础预测器模块:包含三个独立的序列模型,分别是:LSTM+Prophet、LSTM特征提取器+聚类+随机森林、CNN-LSTM。每个模型都独立训练,学习不同的系统动态。3) 元学习器模块:使用堆叠(stacking)方法,将三个基础预测器的输出作为输入,训练一个元学习器,用于融合各个模型的预测结果。4) 优化模块:使用Optuna优化器,对每个基础预测器的超参数进行优化。
关键创新:该方法最重要的创新点在于使用数据驱动的集成模型替代了传统的波变量变换。与传统的基于模型的控制方法不同,该方法能够从数据中学习系统的动态特性,从而更好地适应各种干扰。此外,使用集成模型可以提高预测的准确性和鲁棒性。
关键设计:在基础预测器模块中,LSTM+Prophet模型用于捕捉时间序列的趋势;LSTM特征提取器+聚类+随机森林模型用于提取特征并进行回归;CNN-LSTM模型用于捕捉局部和长期的动态。Optuna优化器用于自动搜索每个模型的最佳超参数。元学习器采用堆叠方法,可以有效地融合各个模型的预测结果。无源性约束被用于保证系统的稳定性。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该数据驱动的集成模型在不同的延迟和噪声条件下,实现了与基线波变量系统相当的透明度,同时通过无源性约束保证了系统的稳定性。虽然论文中没有给出具体的性能数据和提升幅度,但强调了该方法在复杂环境下的鲁棒性,这对于实际应用至关重要。
🎯 应用场景
该研究成果可应用于各种需要远程操作的场景,例如深海探测、太空探索、医疗手术和危险环境处理等。通过提高远程操作系统的透明性和稳定性,可以使操作者更好地感知远程环境,从而提高操作效率和安全性。未来,该方法有望应用于更复杂的远程操作任务,并与其他先进技术相结合,例如虚拟现实和增强现实,进一步提升远程操作体验。
📄 摘要(原文)
Time delays in communication channels present significant challenges for bilateral teleoperation systems, affecting both transparency and stability. Although traditional wave variable-based methods for a four-channel architecture ensure stability via passivity, they remain vulnerable to wave reflections and disturbances like variable delays and environmental noise. This article presents a data-driven hybrid framework that replaces the conventional wave-variable transform with an ensemble of three advanced sequence models, each optimized separately via the state-of-the-art Optuna optimizer, and combined through a stacking meta-learner. The base predictors include an LSTM augmented with Prophet for trend correction, an LSTM-based feature extractor paired with clustering and a random forest for improved regression, and a CNN-LSTM model for localized and long-term dynamics. Experimental validation was performed in Python using data generated from the baseline system implemented in MATLAB/Simulink. The results show that our optimized ensemble achieves a transparency comparable to the baseline wave-variable system under varying delays and noise, while ensuring stability through passivity constraints.