Distributed Traffic State Estimation in V2X-Enabled Connected Vehicle Networks
作者: Vincent de Heij, M. Umar B. Niazi, Saeed Ahmed, Karl Henrik Johansson
分类: eess.SY
发布日期: 2025-12-07
备注: 8 pages, 4 figures, submitted to IFAC World Congress 2026
💡 一句话要点
提出一种基于V2X的分布式交通状态估计框架,解决联网车辆网络中的交通状态感知问题。
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱八:物理动画 (Physics-based Animation)
关键词: 分布式估计 交通状态估计 V2X通信 卡尔曼滤波 共识协议 联网车辆 宏观交通流模型
📋 核心要点
- 现有交通状态估计方法依赖大量固定传感器,成本高昂且覆盖范围有限,难以适应动态交通环境。
- 该论文提出一种基于V2X通信的分布式卡尔曼滤波方法,利用联网车辆作为移动传感器,实现更灵活和经济的交通状态估计。
- 实验结果表明,即使在传感器稀疏和网络连接不稳定的情况下,该方法也能准确重建交通流动态,并分析了车辆渗透率对估计精度的影响。
📝 摘要(中文)
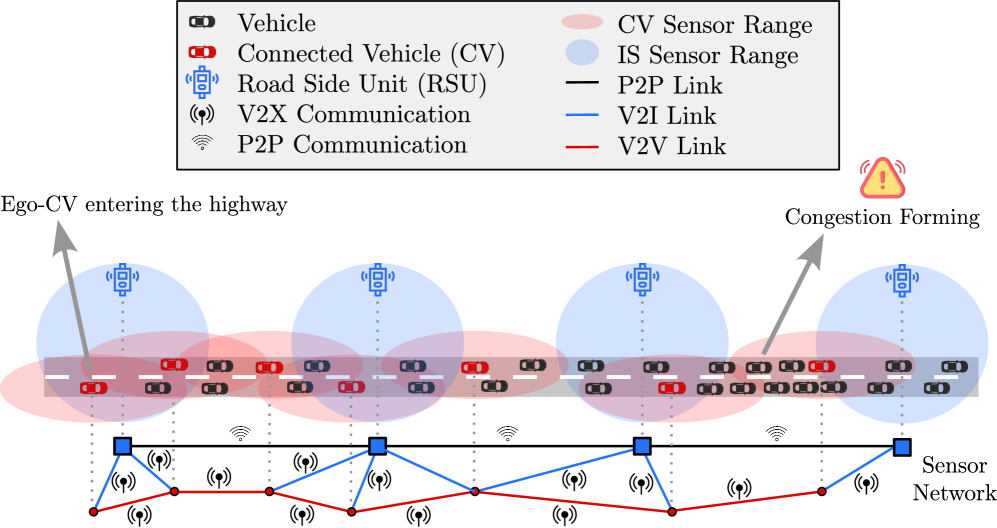
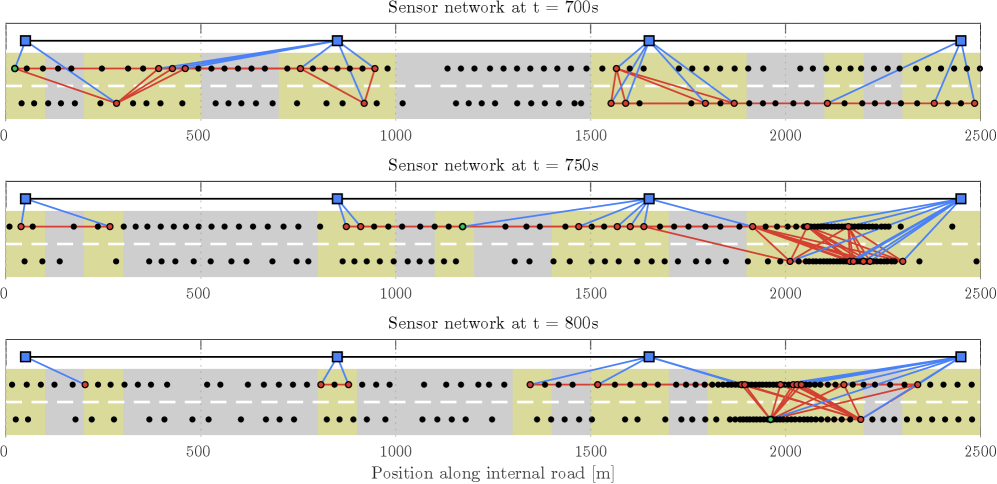
本文提出了一种分布式交通状态估计框架,其中基础设施传感器和联网车辆充当自主、协作的感知节点。这些节点使用车联网(V2X)通信与附近的节点共享本地交通估计。所提出的估计算法使用针对二阶宏观交通流模型定制的分布式卡尔曼滤波器。为了实现全局状态感知,该算法采用共识协议来融合来自V2X邻居的异构时空估计,并应用显式投影步骤来维持密度和流量估计中的物理一致性。通过对经历瞬态拥堵的高速公路路段进行微观仿真,验证了该算法的性能。结果表明,即使在基础设施传感器稀疏和车辆网络连接断断续续的情况下,所提出的分布式估计器也能准确地重建非线性冲击波动态。统计分析探讨了不同的联网车辆渗透率如何影响估计精度,揭示了网络可观测性方面的显著相变。
🔬 方法详解
问题定义:现有交通状态估计方法依赖于密集的固定传感器网络,部署和维护成本高昂。此外,这些方法难以适应快速变化的交通状况,尤其是在传感器覆盖不足的区域。因此,需要一种更灵活、更具成本效益的交通状态估计方法,能够利用新兴的车联网(V2X)技术。
核心思路:该论文的核心思路是利用联网车辆作为移动传感器,通过V2X通信与其他车辆和基础设施共享局部交通状态信息。通过分布式卡尔曼滤波和共识协议,融合来自不同来源的异构数据,实现全局一致的交通状态估计。这种方法能够降低对固定传感器的依赖,提高估计的鲁棒性和适应性。
技术框架:该框架包含以下主要模块:1) 局部估计模块:每个联网车辆和基础设施传感器使用局部数据(如速度、位置、流量)进行初步的交通状态估计。2) V2X通信模块:节点之间通过V2X通信共享局部估计结果。3) 共识融合模块:每个节点使用共识协议融合来自邻居节点的估计结果,得到更准确的局部估计。4) 物理一致性投影模块:对融合后的密度和流量估计进行投影,确保其满足物理约束(如流量守恒)。
关键创新:该论文的关键创新在于将分布式卡尔曼滤波与共识协议相结合,用于解决V2X环境下的交通状态估计问题。与传统的集中式方法相比,该方法具有更好的可扩展性和鲁棒性。此外,论文还提出了显式的物理一致性投影步骤,确保估计结果的物理合理性。
关键设计:该算法使用二阶宏观交通流模型来描述交通动态。分布式卡尔曼滤波器基于该模型进行设计,并使用共识协议来融合来自不同节点的估计结果。物理一致性投影步骤通过求解一个约束优化问题来实现,该问题旨在最小化估计误差,同时满足流量守恒等物理约束。具体的参数设置包括卡尔曼滤波器的过程噪声和测量噪声协方差矩阵,以及共识协议的权重参数。
🖼️ 关键图片

📊 实验亮点
通过微观仿真实验,验证了该分布式估计器在稀疏传感器和间歇性网络连接条件下,能够准确重建非线性冲击波动态。统计分析表明,联网车辆渗透率对估计精度有显著影响,存在一个相变点,超过该点后估计精度显著提高。具体而言,在特定场景下,当联网车辆渗透率达到一定阈值时,估计误差降低了约20%。
🎯 应用场景
该研究成果可应用于智能交通管理系统,提高交通预测和控制的准确性,从而优化交通流量、减少拥堵和降低排放。此外,该方法还可以为自动驾驶车辆提供更可靠的环境感知信息,提高其安全性和效率。未来,该技术有望与边缘计算等技术结合,实现更实时的交通状态估计和预测。
📄 摘要(原文)
This paper presents a distributed traffic state estimation framework in which infrastructure sensors and connected vehicles act as autonomous, cooperative sensing nodes. These nodes share local traffic estimates with nearby nodes using Vehicle-to-Everything (V2X) communication. The proposed estimation algorithm uses a distributed Kalman filter tailored to a second-order macroscopic traffic flow model. To achieve global state awareness, the algorithm employs a consensus protocol to fuse heterogeneous spatiotemporal estimates from V2X neighbors and applies explicit projection steps to maintain physical consistency in density and flow estimates. The algorithm's performance is validated through microscopic simulations of a highway segment experiencing transient congestion. Results demonstrate that the proposed distributed estimator accurately reconstructs nonlinear shockwave dynamics, even with sparse infrastructure sensors and intermittent vehicular network connectivity. Statistical analysis explores how different connected vehicle penetration rates affect estimation accuracy, revealing notable phase transitions in network observability.