Gauss-Newton accelerated MPPI Control
作者: Hannes Homburger, Katrin Baumgärtner, Moritz Diehl, Johannes Reuter
分类: eess.SY, cs.RO
发布日期: 2025-12-04 (更新: 2026-01-19)
备注: 6 pages, 3 figures, submitted to the IFAC World Congress 2026
💡 一句话要点
提出Gauss-Newton加速MPPI控制,提升高维MPC问题的计算效率和可扩展性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 模型预测控制 路径积分控制 Gauss-Newton方法 高维优化 机器人控制
📋 核心要点
- 传统MPPI控制在高维问题中由于蒙特卡洛采样效率降低,导致性能显著下降,限制了其应用范围。
- Gauss-Newton加速MPPI通过引入雅可比矩阵重构和二阶Gauss-Newton方法,提升了优化效率和算法的收敛速度。
- 实验结果表明,该方法在保持MPPI原有优势的同时,显著提高了计算效率和可扩展性,在高维问题中表现更佳。
📝 摘要(中文)
本文提出了一种增强的MPPI(Model Predictive Path Integral)控制方法,称为Gauss-Newton加速MPPI,旨在解决传统MPPI在高维场景下性能下降的问题。传统MPPI作为一种基于采样的优化方法,在机器人和强化学习领域受到广泛关注,尤其是在GPU加速的确定性直接单次拍摄最优控制问题中。虽然MPPI具有灵活性、鲁棒性、易于实现和并行性等优点,但其性能在高维环境中会因蒙特卡洛采样而降低。为了克服这一局限性,本文提出的方法结合了雅可比矩阵重构技术和二阶广义Gauss-Newton方法。数值结果表明,Gauss-Newton加速MPPI显著提高了MPPI的可扩展性和计算效率,同时保留了经典MPPI框架的关键优势,使其成为解决高维问题的有前景的方法。
🔬 方法详解
问题定义:传统MPPI控制在解决高维模型预测控制(MPC)问题时,由于依赖蒙特卡洛采样来估计最优控制序列,其计算复杂度随着状态空间维度的增加而呈指数增长。这导致在高维问题中,MPPI的采样效率降低,难以找到高质量的控制策略,从而影响控制性能。现有方法难以在计算效率和控制性能之间取得平衡。
核心思路:本文的核心思路是将二阶优化方法(Gauss-Newton方法)融入到MPPI框架中,利用雅可比矩阵重构技术来近似Hessian矩阵,从而加速优化过程。通过使用二阶信息,可以更准确地估计最优控制方向,减少采样次数,提高计算效率。这种方法旨在结合MPPI的并行性和Gauss-Newton方法的快速收敛性。
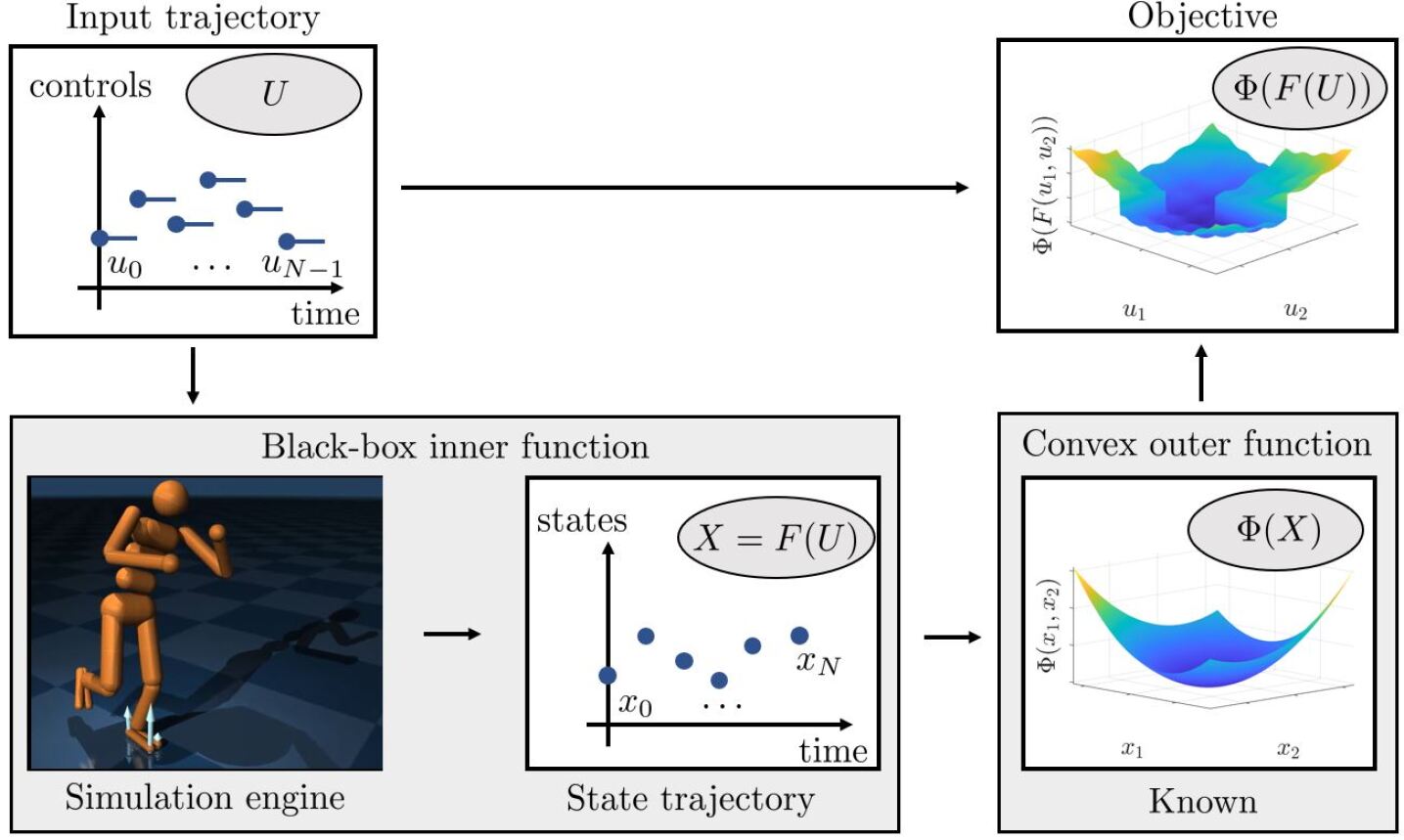
技术框架:Gauss-Newton加速MPPI的整体流程如下:1) 初始化控制序列;2) 通过蒙特卡洛采样生成一系列扰动控制序列;3) 使用动力学模型预测每个扰动控制序列的状态轨迹;4) 利用雅可比矩阵重构技术估计Hessian矩阵;5) 使用广义Gauss-Newton方法更新控制序列;6) 重复步骤2-5,直到收敛。该框架保留了MPPI的采样特性,同时引入了二阶优化步骤。
关键创新:该方法最重要的技术创新点在于将二阶优化方法(Gauss-Newton)与基于采样的MPPI控制相结合。传统MPPI主要依赖于随机采样,而Gauss-Newton加速MPPI则利用雅可比矩阵重构来近似Hessian矩阵,从而实现更有效的优化。与现有方法的本质区别在于,它不再仅仅依赖于随机采样,而是利用二阶信息来指导搜索方向,从而加速收敛。
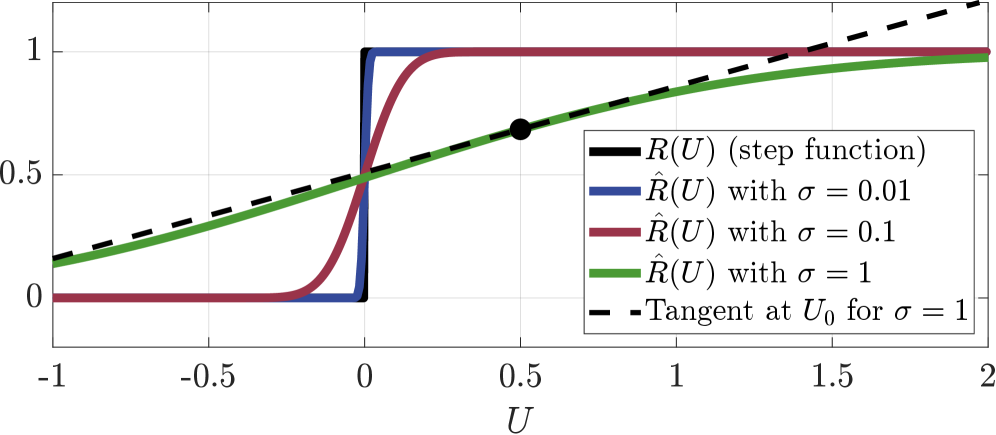
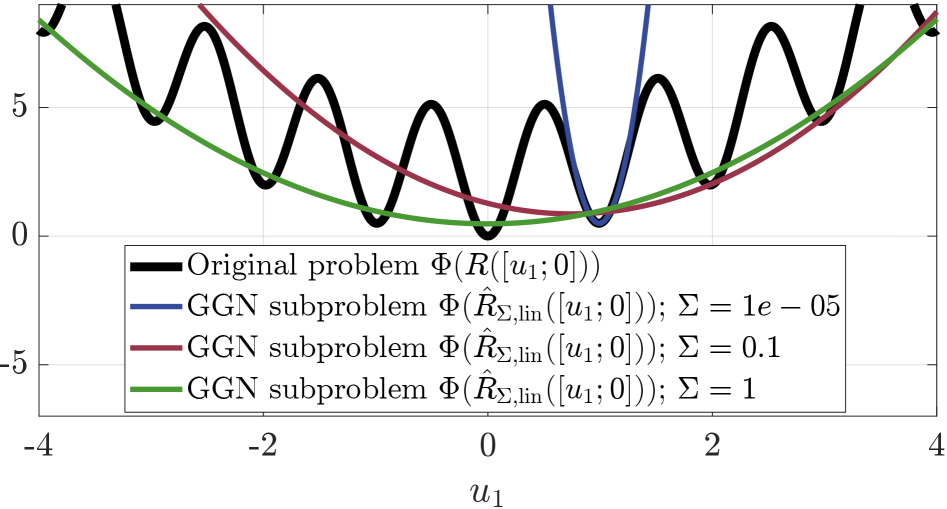
关键设计:关键设计包括:1) 雅可比矩阵重构方法,用于近似计算Hessian矩阵;2) 广义Gauss-Newton方法的具体实现,包括线搜索策略和正则化项的选择;3) 采样数量的设置,需要在计算效率和优化精度之间进行权衡;4) 动力学模型的选择,会影响雅可比矩阵的计算和优化效果。
🖼️ 关键图片
📊 实验亮点
实验结果表明,Gauss-Newton加速MPPI在计算效率和可扩展性方面均优于传统MPPI。具体来说,在高维控制问题中,该方法能够显著减少迭代次数,加速收敛,同时保持了良好的控制性能。虽然论文中没有给出具体的性能数据和对比基线,但强调了该方法在高维问题中的优势。
🎯 应用场景
该研究成果可广泛应用于机器人控制、自动驾驶、航空航天等领域,尤其是在需要高精度和快速响应的高维复杂系统中。例如,可以用于无人机的敏捷飞行控制、复杂地形下的机器人导航、以及高自由度机械臂的运动规划。该方法能够提高控制系统的实时性和鲁棒性,具有重要的实际应用价值和潜在的未来影响。
📄 摘要(原文)
Model Predictive Path Integral (MPPI) control is a sampling-based optimization method that has recently attracted attention, particularly in the robotics and reinforcement learning communities. MPPI has been widely applied as a GPU-accelerated random search method to deterministic direct single-shooting optimal control problems arising in model predictive control (MPC) formulations. MPPI offers several key advantages, including flexibility, robustness, ease of implementation, and inherent parallelizability. However, its performance can deteriorate in high-dimensional settings since the optimal control problem is solved via Monte Carlo sampling. To address this limitation, this paper proposes an enhanced MPPI method that incorporates a Jacobian reconstruction technique and the second-order Generalized Gauss-Newton method. This novel approach is called \textit{Gauss-Newton accelerated MPPI}. The numerical results show that the Gauss-Newton accelerated MPPI approach substantially improves MPPI scalability and computational efficiency while preserving the key benefits of the classical MPPI framework, making it a promising approach even for high-dimensional problems.