An LLM-Assisted Multi-Agent Control Framework for Roll-to-Roll Manufacturing Systems
作者: Jiachen Li, Shihao Li, Christopher Martin, Zijun Chen, Dongmei Chen, Wei Li
分类: eess.SY
发布日期: 2025-11-28
💡 一句话要点
提出LLM辅助的多智能体控制框架,用于辊对辊制造系统的自动化控制与自适应
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 辊对辊制造 多智能体控制 大型语言模型 自动化控制 自适应控制
📋 核心要点
- 辊对辊制造中,控制器调试和适应依赖专家知识且耗时,难以应对复杂和变化的生产条件。
- 利用LLM辅助的多智能体框架,实现控制系统的自动设计、安全自适应和持续优化,降低人工干预。
- 实验表明,该框架在模型不确定性下实现了张力调节和速度跟踪,并通过迭代自适应实现了性能收敛。
📝 摘要(中文)
辊对辊(R2R)制造需要精确的张力和速度控制以确保产品质量,但控制器调试和自适应仍然是耗时的过程,依赖于专家知识。本文提出了一种LLM辅助的多智能体框架,该框架可自动执行R2R系统的控制系统设计和自适应,同时保持安全性。该框架通过五个阶段运行:从运行数据中进行系统辨识,自动控制器选择和调整,通过安全验证进行sim-to-real自适应,具有诊断功能的连续监控以及周期性模型细化。在R2R系统上的实验验证表明,在显着的模型不确定性下,张力调节和速度跟踪均成功,并且该框架通过迭代自适应实现了性能收敛。该方法减少了手动调整工作,同时为维护计划提供了透明的诊断信息,从而为在制造控制系统中集成AI辅助自动化提供了一条实用途径。
🔬 方法详解
问题定义:辊对辊(R2R)制造系统需要精确的张力和速度控制,以保证产品质量。然而,传统的控制器设计和调试过程高度依赖于领域专家知识,并且耗时费力,难以适应生产过程中不断变化的需求和系统不确定性。现有方法缺乏自动化和智能化的手段,难以实现控制系统的快速部署和优化。
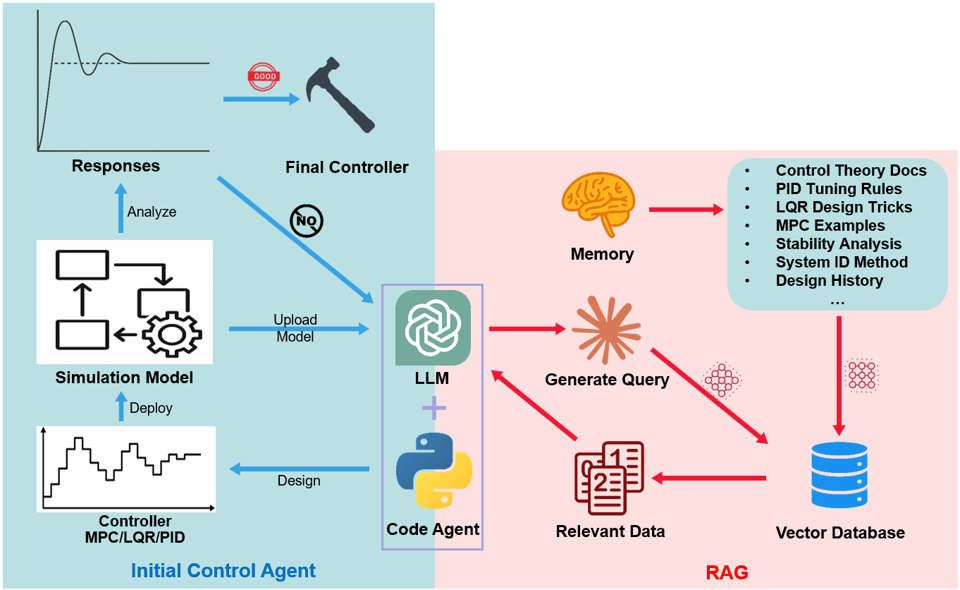
核心思路:本文的核心思路是利用大型语言模型(LLM)的强大推理和决策能力,构建一个多智能体控制框架,实现R2R制造系统的自动化控制和自适应。通过LLM的辅助,可以自动完成系统辨识、控制器选择和调整、sim-to-real自适应等关键步骤,从而降低对人工干预的依赖,提高控制系统的效率和鲁棒性。
技术框架:该框架包含五个主要阶段:1) 系统辨识:从运行数据中学习R2R系统的动态模型;2) 控制器选择和调整:利用LLM根据系统模型和控制目标自动选择合适的控制器类型并进行参数调整;3) Sim-to-Real自适应:将仿真环境中的控制器迁移到实际系统,并通过安全验证确保控制器的安全性;4) 连续监控:实时监测系统性能,并提供诊断信息;5) 模型细化:定期利用新的运行数据更新系统模型,提高模型的准确性。
关键创新:该论文的关键创新在于将LLM引入到R2R制造系统的控制系统中,实现控制系统的自动化设计和自适应。与传统的控制方法相比,该方法能够自动完成控制器选择和参数调整,减少了对人工干预的依赖,提高了控制系统的效率和鲁棒性。此外,该框架还考虑了控制系统的安全性,通过安全验证确保控制器的安全性。
关键设计:在控制器选择和调整阶段,LLM被用于根据系统模型和控制目标自动选择合适的控制器类型(例如PID控制器、模型预测控制器等)并进行参数调整。LLM通过学习大量的控制知识和经验,能够根据具体的系统特性和控制需求,选择最优的控制器类型和参数。在Sim-to-Real自适应阶段,采用了域自适应技术,将仿真环境中的控制器迁移到实际系统,并通过安全验证确保控制器的安全性。安全验证过程包括对控制器的输出进行约束,防止控制器产生不安全的行为。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该框架在R2R系统上实现了成功的张力调节和速度跟踪,即使在存在显著模型不确定性的情况下也能保持良好的性能。通过迭代自适应,该框架实现了性能收敛,表明其具有良好的鲁棒性和自适应能力。与传统的手动调整方法相比,该框架显著减少了人工调整工作量,并提供了透明的诊断信息,为维护计划提供了支持。
🎯 应用场景
该研究成果可广泛应用于各种辊对辊制造系统,例如薄膜制造、印刷、纺织等领域。通过自动化控制系统设计和自适应,可以显著提高生产效率、降低生产成本、提高产品质量。此外,该框架提供的透明诊断信息有助于维护计划的制定,减少停机时间。未来,该方法有望推广到其他类型的制造系统,实现更广泛的AI辅助自动化。
📄 摘要(原文)
Roll-to-roll manufacturing requires precise tension and velocity control to ensure product quality, yet controller commissioning and adaptation remain time-intensive processes dependent on expert knowledge. This paper presents an LLM-assisted multi-agent framework that automates control system design and adaptation for R2R systems while maintaining safety. The framework operates through five phases: system identification from operational data, automated controller selection and tuning, sim-to-real adaptation with safety verification, continuous monitoring with diagnostic capabilities, and periodic model refinement. Experimental validation on a R2R system demonstrates successful tension regulation and velocity tracking under significant model uncertainty, with the framework achieving performance convergence through iterative adaptation. The approach reduces manual tuning effort while providing transparent diagnostic information for maintenance planning, offering a practical pathway for integrating AI-assisted automation in manufacturing control systems.