Large Language Models for Control
作者: Adil Rasheed, Oscar Ravik, Omer San
分类: eess.SY
发布日期: 2025-11-01
💡 一句话要点
探索大语言模型直接生成控制指令,无需人工干预
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 控制系统 机器人控制 网络物理系统 提示工程
📋 核心要点
- 传统控制系统设计需要专业的控制工程知识和手动调整算法,成本高且难以适应动态变化的环境。
- 该论文探索利用大型语言模型直接生成控制指令,无需人工干预,降低了控制系统设计的门槛。
- 实验结果表明,仅使用提示的LLM即可实现可行的控制,工具增强版本能更好地适应变化的目标。
📝 摘要(中文)
本文研究使用大型语言模型(LLM)直接生成控制动作,无需控制工程专业知识或手动调整的算法。我们实现了几个变体:(i)仅提示,(ii)工具辅助,可以访问历史数据,以及(iii)预测辅助,使用学习或简单模型来评估候选动作。我们在跟踪精度和驱动力方面比较了它们,无论是否有提示要求降低执行器使用率。结果表明,仅提示的LLM已经产生了可行的控制,而工具增强的版本可以更好地适应不断变化的目标,但对约束条件可能更敏感,从而支持当今不断发展的网络物理系统的LLM在环控制以及操作员和人工输入。
🔬 方法详解
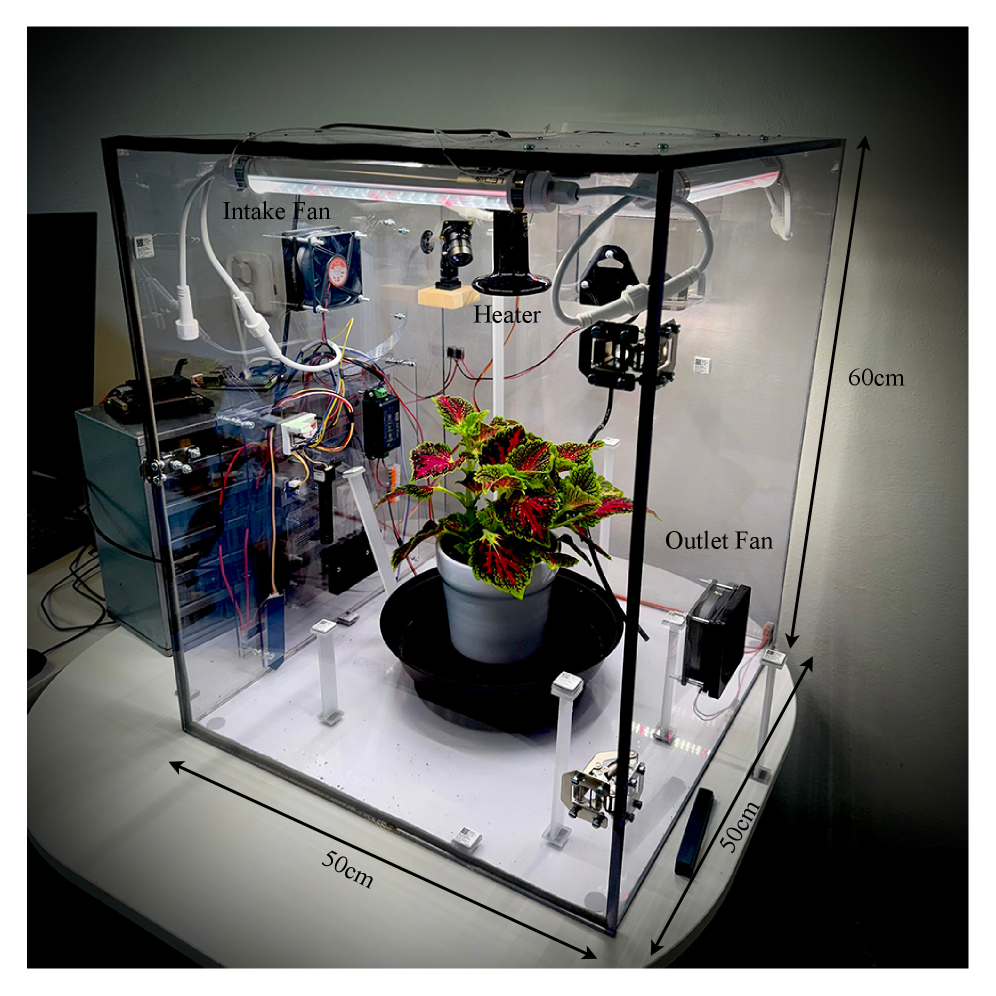
问题定义:现有控制系统设计依赖于专业的控制工程知识和手动调参,这不仅需要大量的人力投入,而且难以快速适应动态变化的环境。特别是对于复杂的网络物理系统,其控制目标可能随时间演变,传统方法难以有效应对。
核心思路:本文的核心思路是利用大型语言模型(LLM)的强大语言理解和生成能力,直接将控制问题转化为语言提示,让LLM生成相应的控制指令。这种方法旨在摆脱对传统控制工程知识的依赖,实现更灵活、更易于部署的控制系统。
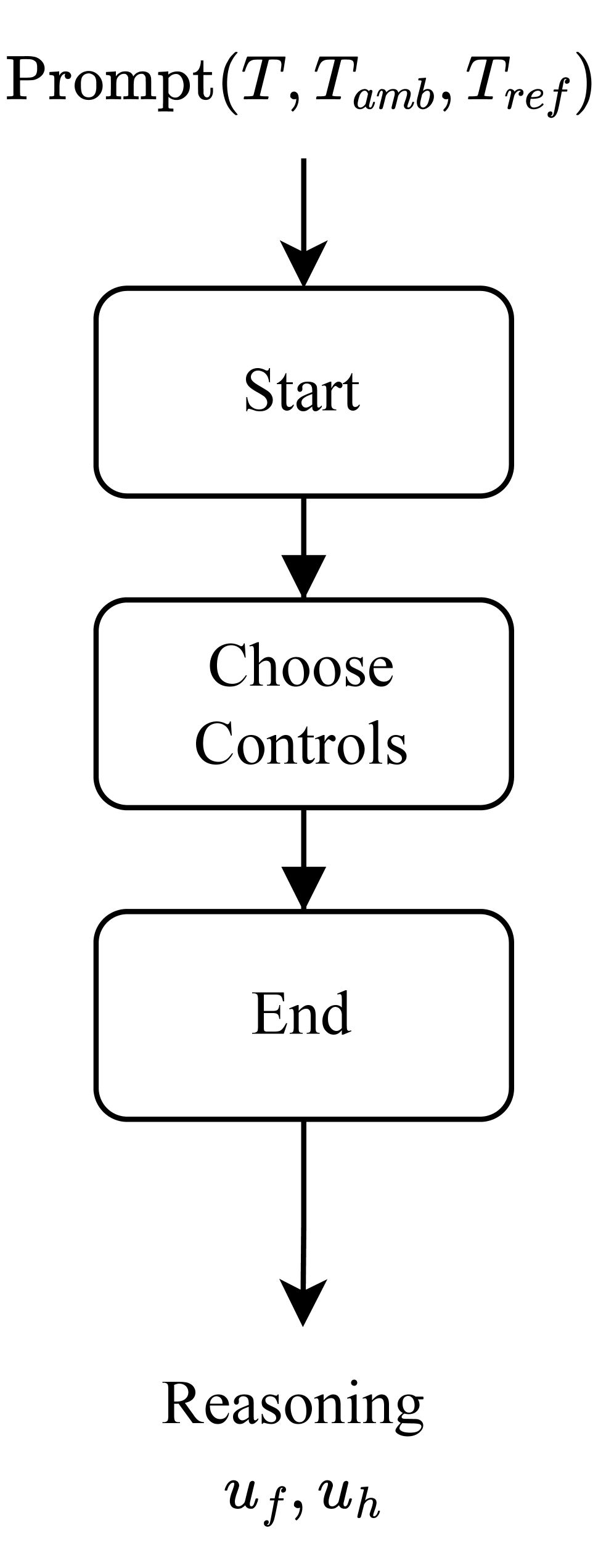
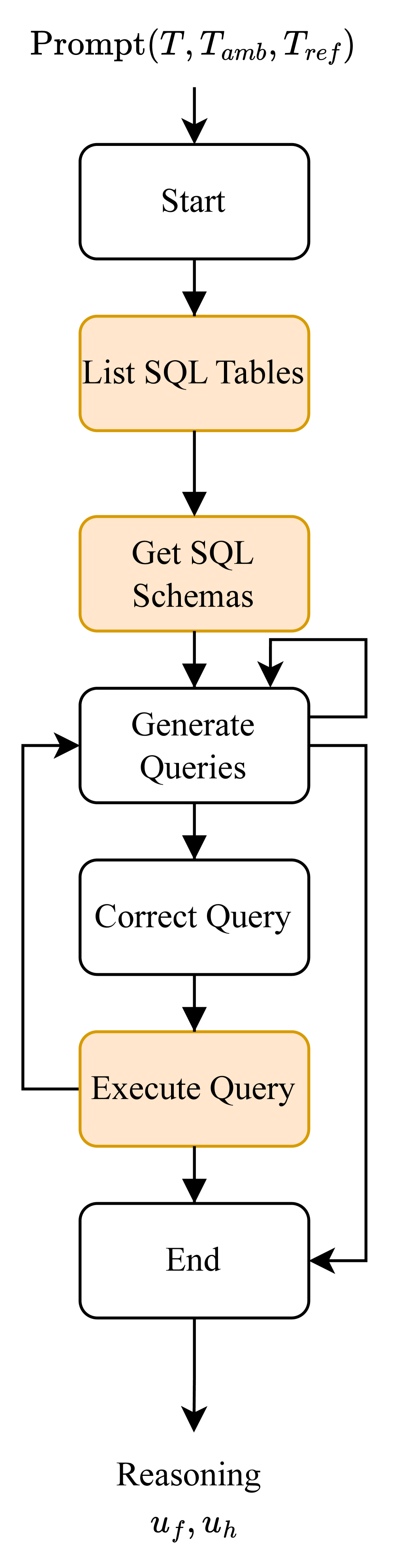
技术框架:论文提出了三种基于LLM的控制框架:(1)Prompt-only:仅使用自然语言提示LLM生成控制动作。(2)Tool-assisted:LLM可以访问历史数据,例如传感器读数和之前的控制动作,以辅助决策。(3)Prediction-assisted:使用学习模型或简单模型对LLM生成的候选动作进行评分,选择最优动作。这三种框架都以LLM为核心,通过不同的方式增强LLM的控制能力。
关键创新:该论文的关键创新在于探索了LLM在控制领域的直接应用,无需将LLM作为传统控制器的辅助模块,而是直接利用其生成控制指令。这种方法颠覆了传统的控制系统设计思路,为控制领域带来了新的可能性。
关键设计:在Prompt-only框架中,提示的设计至关重要,需要清晰地描述控制目标和约束条件。在Tool-assisted框架中,如何有效地利用历史数据来指导LLM的决策是一个关键问题。在Prediction-assisted框架中,评分模型的选择和训练对最终的控制性能有很大影响。论文还探索了如何通过提示来引导LLM降低执行器的使用率。
🖼️ 关键图片
📊 实验亮点
实验结果表明,仅使用提示的LLM即可实现可行的控制,无需任何控制工程专业知识。工具增强的版本能够更好地适应不断变化的目标,但对约束条件可能更敏感。通过添加降低执行器使用率的提示,可以有效降低执行器的使用率,同时保持良好的跟踪精度。
🎯 应用场景
该研究成果可应用于各种需要灵活控制的场景,例如机器人控制、自动驾驶、智能家居、工业自动化等。特别是在网络物理系统中,控制目标可能随时间演变,基于LLM的控制方法能够更好地适应这种变化。此外,该方法还可以降低控制系统设计的门槛,使非专业人士也能参与到控制系统的开发中。
📄 摘要(原文)
This paper investigates using large language models (LLMs) to generate control actions directly, without requiring control-engineering expertise or hand-tuned algorithms. We implement several variants: (i) prompt-only, (ii) tool-assisted with access to historical data, and (iii) prediction-assisted using learned or simple models to score candidate actions. We compare them on tracking accuracy and actuation effort, with and without a prompt that requests lower actuator usage. Results show prompt-only LLMs already produce viable control, while tool-augmented versions adapt better to changing objectives but can be more sensitive to constraints, supporting LLM-in-the-loop control for evolving cyber-physical systems today and operator and human inputs.