Efficient Collision-Avoidance Constraints for Ellipsoidal Obstacles in Optimal Control: Application to Path-Following MPC and UAVs
作者: David Leprich, Mario Rosenfelder, Markus Herrmann-Wicklmayr, Kathrin Flaßkamp, Peter Eberhard, Henrik Ebel
分类: eess.SY, cs.RO
发布日期: 2025-10-30
💡 一句话要点
提出高效椭球避障约束,用于路径跟踪MPC和无人机控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机 模型预测控制 最优控制 椭球避障 碰撞检测
📋 核心要点
- 现有方法在复杂环境下无人机避障存在计算量大、实时性差等问题,难以满足实际应用需求。
- 论文提出一种高效的椭球障碍物碰撞检测方法,并结合两阶段优化策略,降低计算复杂度,提高控制频率。
- 通过仿真和真实无人机实验验证了该方法在三维空间避障中的有效性,实现了无人机安全、高效的路径跟踪。
📝 摘要(中文)
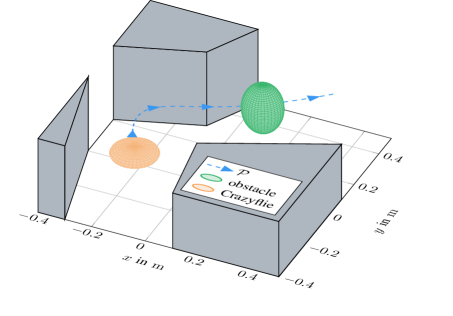
本文提出了一个模块化的最优控制框架,用于局部三维椭球障碍物规避,并以模型预测路径跟踪控制为例进行了应用。该框架同时考虑了静态和移动的障碍物。该方法的核心在于一种计算高效且连续可微的条件,用于检测与椭球障碍物的碰撞。一种新颖的两阶段优化方法缓解了由此产生的最优控制问题的结构所带来的数值问题。通过仿真和使用Crazyflie四旋翼无人机的真实世界实验,证明了该方法的有效性。这代表了同类MPC控制器在三维任务中首次在无人机硬件上的演示。
🔬 方法详解
问题定义:论文旨在解决无人机在复杂三维环境中,如何高效、安全地避开静态和动态椭球障碍物的问题。现有方法通常计算复杂度高,难以满足实时性要求,或者采用简化模型导致避障效果不佳。
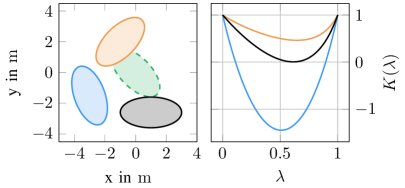
核心思路:论文的核心思路是利用椭球的几何特性,设计一种计算高效且连续可微的碰撞检测条件。同时,采用两阶段优化方法,将复杂的优化问题分解为两个子问题,从而降低计算复杂度,提高求解效率。
技术框架:该方法包含以下主要模块:1) 椭球障碍物建模:使用椭球参数描述障碍物的位置、形状和大小。2) 碰撞检测:基于设计的碰撞检测条件,判断无人机与椭球障碍物是否发生碰撞。3) 最优控制:构建最优控制问题,目标是最小化路径跟踪误差和控制量,同时满足避障约束。4) 两阶段优化:将最优控制问题分解为两个阶段,第一阶段求解参考轨迹,第二阶段进行局部优化,实现精确的路径跟踪和避障。
关键创新:论文的关键创新在于提出了一种计算高效且连续可微的椭球碰撞检测条件。该条件能够快速准确地判断无人机与椭球障碍物是否发生碰撞,避免了复杂的几何计算。此外,两阶段优化方法也显著降低了计算复杂度,提高了控制器的实时性。
关键设计:碰撞检测条件的设计基于椭球的代数表示,通过求解一个简单的代数方程来判断碰撞。两阶段优化中,第一阶段采用全局规划算法生成参考轨迹,第二阶段采用模型预测控制(MPC)进行局部优化。MPC的损失函数包括路径跟踪误差、控制量和避障惩罚项。避障惩罚项的设计基于碰撞检测条件,当无人机接近障碍物时,惩罚项增大,从而引导无人机避开障碍物。
🖼️ 关键图片

📊 实验亮点
通过仿真和真实无人机实验,验证了该方法的有效性。实验结果表明,该方法能够实现无人机在三维空间中安全、高效地避开静态和动态椭球障碍物,并实现精确的路径跟踪。这是首次在无人机硬件上演示同类MPC控制器在三维任务中的应用,具有重要的里程碑意义。
🎯 应用场景
该研究成果可广泛应用于无人机自主导航、机器人避障、自动驾驶等领域。通过高效的椭球避障约束,可以提高无人机在复杂环境中的安全性和可靠性,实现更智能化的自主飞行。该方法还可扩展到其他类型的机器人和障碍物,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
This article proposes a modular optimal control framework for local three-dimensional ellipsoidal obstacle avoidance, exemplarily applied to model predictive path-following control. Static as well as moving obstacles are considered. Central to the approach is a computationally efficient and continuously differentiable condition for detecting collisions with ellipsoidal obstacles. A novel two-stage optimization approach mitigates numerical issues arising from the structure of the resulting optimal control problem. The effectiveness of the approach is demonstrated through simulations and real-world experiments with the Crazyflie quadrotor. This represents the first hardware demonstration of an MPC controller of this kind for UAVs in a three-dimensional task.