Kalman-Bucy Filtering with Randomized Sensing: Fundamental Limits and Sensor Network Design for Field Estimation
作者: Xinyi Wang, Devansh R. Agrawal, Dimitra Panagou
分类: eess.SY, cs.MA
发布日期: 2025-10-29 (更新: 2025-11-18)
💡 一句话要点
针对随机传感器网络的场估计,提出基于随机采样的Kalman-Bucy滤波理论框架与传感器网络设计方法。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: Kalman滤波 随机采样 传感器网络 场估计 稳定性分析
📋 核心要点
- 现有Kalman滤波研究较少考虑测量矩阵和噪声协方差随传感位置变化的通用连续时间框架。
- 论文提出基于清晰度的网格独立下限,通过综合传感参数揭示了传感器数量、噪声和测量频率对性能的综合影响。
- 仿真表明,提出的界限对于离散时间Kalman滤波器是紧的,并为传感器网络设计提供了高效指导。
📝 摘要(中文)
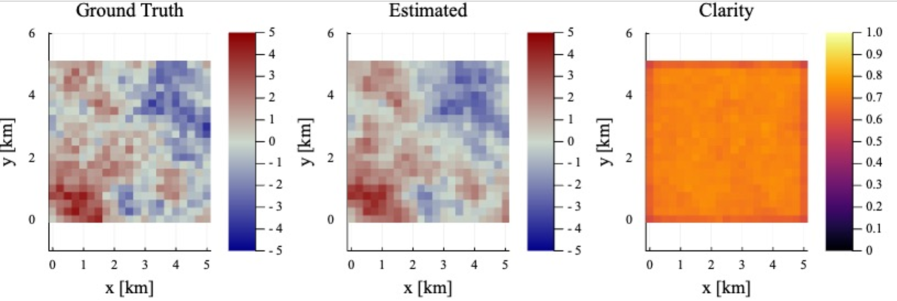
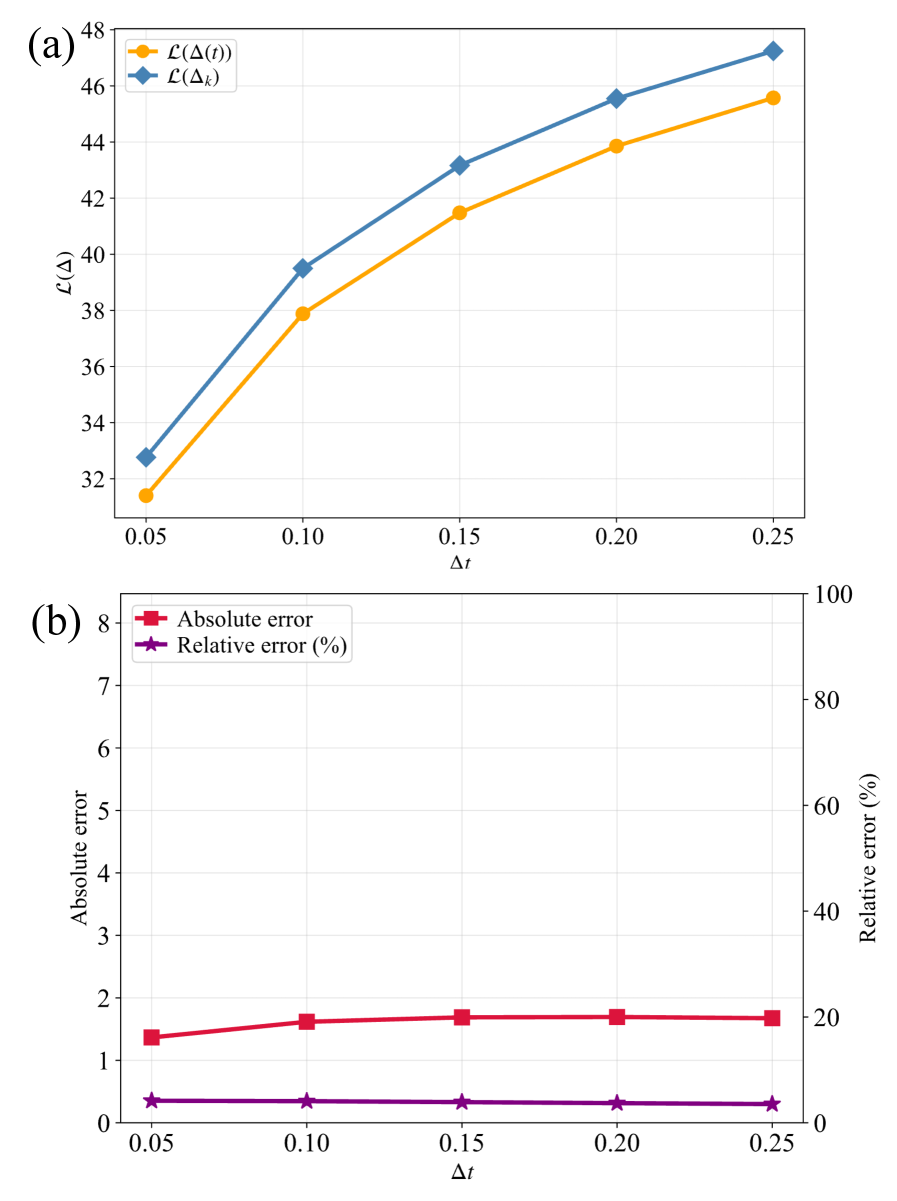
本文重新审视了测量值随机丢失情况下Kalman滤波的稳定性问题,并将其置于一个更通用的连续时间框架中,其中测量矩阵和噪声协方差均作为随机过程演变,从而捕捉了传感位置的可变性。在此设置下,我们推导了连续时间Kalman滤波的期望估计协方差的闭式上限。然后,我们将此框架应用于时空场估计,其中该场被建模为由随机定位的噪声传感器观测到的高斯过程。利用清晰度(clarity),即我们早期工作中引入的随机变量微分熵的重新缩放形式,我们建立了空间平均期望清晰度的网格独立下限。该结果通过一个综合传感参数揭示了基本性能限制,该参数共同捕获了传感器数量、噪声水平和测量频率的影响。仿真结果证实,所提出的界限对于离散时间Kalman滤波器是紧的,随着测量速率的降低而接近它,同时避免了离散时间公式中所需的递归计算。最重要的是,推导出的限制为部署前的传感器网络设计问题提供了原则性和高效的指导。
🔬 方法详解
问题定义:论文旨在解决在传感器随机分布且测量数据随机丢失的情况下,如何对时空场进行精确估计的问题。传统Kalman滤波方法在处理测量矩阵和噪声协方差随传感位置变化的情况时存在局限性,难以分析其稳定性并指导传感器网络设计。现有方法通常依赖于离散时间框架,计算复杂度高,且难以揭示传感器数量、噪声水平和测量频率等因素对估计性能的综合影响。
核心思路:论文的核心思路是建立一个通用的连续时间Kalman滤波框架,将测量矩阵和噪声协方差建模为随机过程,从而捕捉传感位置的可变性。通过推导期望估计协方差的闭式上限,并结合信息论中的清晰度概念,揭示传感器网络性能的根本限制。这种方法允许在部署前对传感器网络进行优化设计,从而提高场估计的精度和效率。
技术框架:论文的技术框架主要包括以下几个阶段:1) 建立连续时间Kalman滤波模型,其中测量矩阵和噪声协方差是随机过程。2) 推导期望估计协方差的闭式上限。3) 将该框架应用于时空场估计,将场建模为高斯过程。4) 利用清晰度概念,建立空间平均期望清晰度的网格独立下限。5) 通过仿真验证理论结果,并展示其在传感器网络设计中的应用。
关键创新:论文的关键创新在于:1) 提出了一个通用的连续时间Kalman滤波框架,能够处理测量矩阵和噪声协方差随传感位置变化的情况。2) 推导了期望估计协方差的闭式上限,为分析Kalman滤波的稳定性提供了理论基础。3) 利用清晰度概念,建立了空间平均期望清晰度的网格独立下限,揭示了传感器网络性能的根本限制。4) 提出了基于理论结果的传感器网络设计方法,能够在部署前优化传感器网络的配置。
关键设计:论文的关键设计包括:1) 将测量矩阵和噪声协方差建模为随机过程,需要选择合适的随机过程模型来描述其变化规律。2) 推导期望估计协方差的闭式上限,需要利用Kalman-Bucy滤波理论和随机过程理论。3) 利用清晰度概念,需要选择合适的清晰度定义和计算方法。4) 传感器网络设计方法需要考虑传感器数量、噪声水平、测量频率等因素,并根据具体的应用场景进行优化。
🖼️ 关键图片

📊 实验亮点
论文通过仿真验证了所提出的界限对于离散时间Kalman滤波器是紧的,并且随着测量速率的降低而接近该界限。此外,论文还展示了如何利用理论结果进行传感器网络设计,例如,通过调整传感器数量、噪声水平和测量频率,可以优化场估计的性能。
🎯 应用场景
该研究成果可应用于环境监测、农业生产、智能交通等领域。例如,在环境监测中,可以利用随机部署的传感器网络对空气质量、水质等进行实时监测和估计。在农业生产中,可以利用传感器网络对土壤湿度、温度等进行监测,从而优化灌溉和施肥策略。在智能交通中,可以利用车辆上的传感器对交通流量、拥堵情况等进行监测,从而优化交通调度。
📄 摘要(原文)
Stability analysis of the Kalman filter under randomly lost measurements has been widely studied. We revisit this problem in a general continuous-time framework, where both the measurement matrix and noise covariance evolve as random processes, capturing variability in sensing locations. Within this setting, we derive a closed-form upper bound on the expected estimation covariance for continuous-time Kalman filtering. We then apply this framework to spatiotemporal field estimation, where the field is modeled as a Gaussian process observed by randomly located, noisy sensors. Using clarity, introduced in our earlier work as a rescaled form of the differential entropy of a random variable, we establish a grid-independent lower bound on the spatially averaged expected clarity. This result exposes fundamental performance limits through a composite sensing parameter that jointly captures the effects of the number of sensors, noise level, and measurement frequency. Simulations confirm that the proposed bound is tight for the discrete-time Kalman filter, approaching it as the measurement rate decreases, while avoiding the recursive computations required in the discrete-time formulation. Most importantly, the derived limits provide principled and efficient guidelines for sensor network design problem prior to deployment.