Tight Collision Avoidance for Stochastic Optimal Control: with Applications in Learning-based, Interactive Motion Planning
作者: Erik Börve, Nikolce Murgovski, Leo Laine
分类: eess.SY
发布日期: 2025-10-29
备注: Preprint article, submitted for publication
💡 一句话要点
提出基于随机最优控制的紧凑型避撞方法,用于学习型交互式运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 随机最优控制 运动规划 避撞 马尔可夫决策过程 自动驾驶 交互式场景 机会约束
📋 核心要点
- 现有方法在处理复杂交通场景中的轨迹规划时,难以兼顾人类驾驶员行为的不确定性和非凸避撞约束。
- 该论文提出一种基于随机最优控制的框架,将人类驾驶员建模为马尔可夫决策过程,并采用紧凑集之间的距离约束处理非凸避撞。
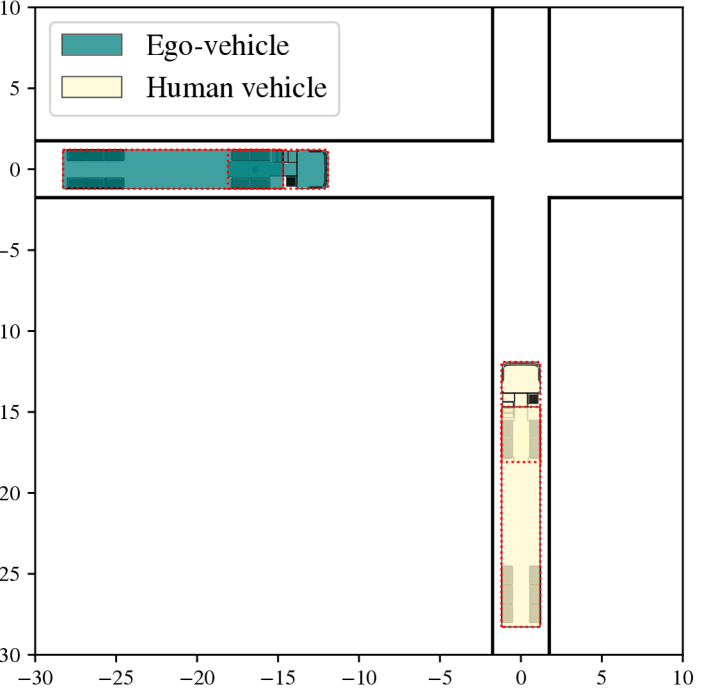
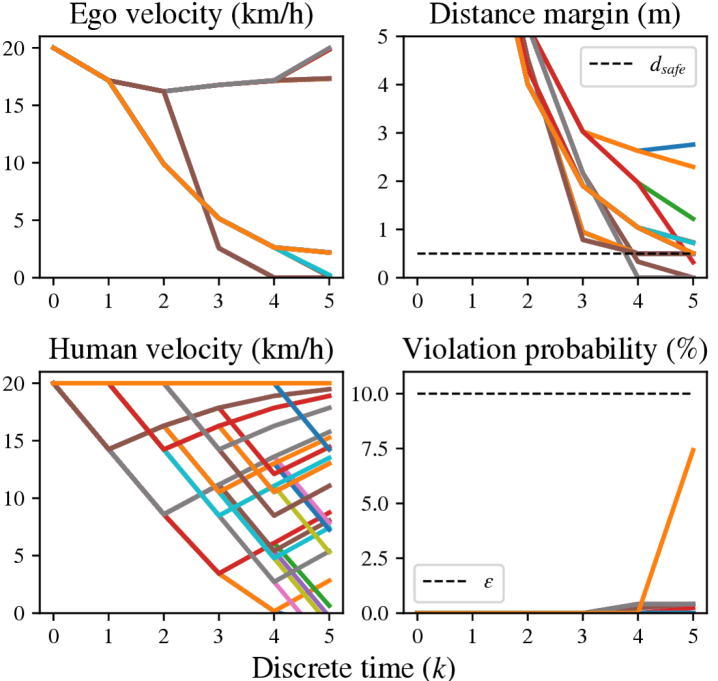
- 通过在无管制交叉口和高速公路变道等场景的仿真实验,验证了该方法在交互式运动规划中的有效性。
📝 摘要(中文)
在复杂、交互式的交通场景中进行轨迹规划对自动驾驶车辆提出了严峻的挑战,这主要是由于人类驾驶员行为的不确定性以及避撞约束的非凸性。本文提出了一种随机最优控制框架,旨在同时解决这些问题,避免过度保守的近似。我们将人类驾驶员的决策建模为马尔可夫决策过程,并提出了一种通过在紧凑集之间施加正距离约束来处理非凸车辆形状之间避撞的方法。在该框架下,我们研究了三种可选的机会约束公式。为了确保计算的可行性,我们引入了非凸距离约束和机会约束的紧凑、连续可微的重构。通过对两个具有挑战性的交互场景(无管制交叉口穿越和密集交通中的高速公路变道)的仿真研究,证明了我们方法的有效性。
🔬 方法详解
问题定义:论文旨在解决自动驾驶车辆在复杂交互式交通场景中的轨迹规划问题,尤其是在存在人类驾驶员且行为具有不确定性的情况下。现有方法通常采用保守的近似来处理避撞约束,导致规划的轨迹不够灵活,或者难以处理非凸的车辆形状。此外,人类驾驶员行为的不确定性也使得轨迹规划更具挑战性。
核心思路:论文的核心思路是将人类驾驶员的决策建模为马尔可夫决策过程(MDP),从而捕捉其行为的不确定性。同时,采用紧凑集之间的距离约束来处理非凸车辆形状之间的避撞问题,避免了过度简化或保守的近似。通过随机最优控制框架,将避撞约束和人类驾驶员行为的不确定性纳入优化问题中,从而实现更安全、更高效的轨迹规划。
技术框架:整体框架包括以下几个主要步骤:1) 建立人类驾驶员行为的MDP模型;2) 定义车辆的运动学模型和非凸形状;3) 引入紧凑集之间的距离约束来表示避撞约束;4) 采用随机最优控制方法,将轨迹规划问题转化为一个优化问题,目标是最小化成本函数(例如,行驶时间、舒适度等),同时满足避撞约束和车辆运动学约束;5) 求解该优化问题,得到最优的轨迹。
关键创新:论文的关键创新在于:1) 将人类驾驶员行为建模为MDP,从而能够更好地处理其行为的不确定性;2) 采用紧凑集之间的距离约束来处理非凸车辆形状之间的避撞问题,避免了过度简化或保守的近似;3) 提出了三种可选的机会约束公式,并引入了紧凑、连续可微的重构,以确保计算的可行性。与现有方法相比,该方法能够更有效地处理复杂交互式交通场景中的轨迹规划问题。
关键设计:论文中关键的设计包括:1) MDP模型的状态空间、动作空间和转移概率的设计,需要能够准确地描述人类驾驶员的行为;2) 紧凑集的选择,需要能够有效地近似车辆的非凸形状,同时保证计算的效率;3) 机会约束公式的选择,需要根据具体的应用场景和性能要求进行权衡;4) 优化问题的求解算法,需要能够有效地处理非凸约束和随机性。
🖼️ 关键图片

📊 实验亮点
论文通过仿真实验验证了该方法的有效性。在无管制交叉口穿越和密集交通中的高速公路变道等场景中,该方法能够生成安全、高效的轨迹,并能够有效地处理人类驾驶员行为的不确定性。具体的性能数据(例如,碰撞率、行驶时间等)和与基线方法的对比结果(具体数值未知)在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于自动驾驶车辆的运动规划和决策控制,尤其是在城市交通、高速公路等复杂交互式环境中。通过更精确地预测人类驾驶员的行为并实现更紧凑的避撞,可以提高自动驾驶车辆的安全性、效率和舒适性。此外,该方法还可以应用于机器人导航、无人机编队等领域。
📄 摘要(原文)
Trajectory planning in dense, interactive traffic scenarios presents significant challenges for autonomous vehicles, primarily due to the uncertainty of human driver behavior and the non-convex nature of collision avoidance constraints. This paper introduces a stochastic optimal control framework to address these issues simultaneously, without excessively conservative approximations. We opt to model human driver decisions as a Markov Decision Process and propose a method for handling collision avoidance between non-convex vehicle shapes by imposing a positive distance constraint between compact sets. In this framework, we investigate three alternative chance constraint formulations. To ensure computational tractability, we introduce tight, continuously differentiable reformulations of both the non-convex distance constraints and the chance constraints. The efficacy of our approach is demonstrated through simulation studies of two challenging interactive scenarios: an unregulated intersection crossing and a highway lane change in dense traffic.