Robust Multi-Agent Safety via Tube-Based Tightened Exponential Barrier Functions
作者: Armel Koulong, Ali Pakniyat
分类: eess.SY
发布日期: 2025-10-26
备注: This work has been submitted to IFAC for possible publication
💡 一句话要点
提出基于Tube的指数Barrier函数收紧方法,实现多智能体系统鲁棒安全控制
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多智能体系统 鲁棒控制 安全控制 指数Barrier函数 模型预测控制
📋 核心要点
- 现有方法难以在存在有界扰动的情况下,为非线性多智能体系统设计具有可证明安全性的控制器。
- 通过设计辅助反馈律将状态误差限制在RPI Tube内,并利用Tube的几何形状推导状态相关的安全裕度。
- 在分布式MPC框架下实施该规划器,在保证鲁棒安全性的同时优化性能,验证了方法的实用性。
📝 摘要(中文)
本文提出了一种构造性的框架,用于综合具有可证明安全性的非线性多智能体系统控制器,该系统受到有界扰动的影响。该方法适用于可以用Brunovsky规范形式表示的系统,适应多维空间中的任意阶动力学。核心贡献是一种约束收紧方法,该方法将鲁棒误差反馈与标称轨迹规划正式结合起来。关键的见解是,辅助反馈律的设计将状态误差限制在鲁棒正不变(RPI)Tube内,同时提供了确保标称计划安全所需的精确信息。具体来说,通过其支持函数来利用所得RPI Tube的几何形状,以推导状态相关的安全裕度。然后,这些裕度用于系统地收紧施加在标称规划器上的高相对阶指数控制Barrier函数(eCBF)约束。这种综合保证了任何满足收紧约束的标称轨迹都对应于真实、受扰动系统的可证明安全轨迹。我们通过在分布式模型预测控制(MPC)方案中实施该规划器来证明这种形式综合方法的实际效用,该方案在继承鲁棒安全保证的同时优化了性能。
🔬 方法详解
问题定义:论文旨在解决非线性多智能体系统在有界扰动下,如何设计具有可证明安全性的控制器的问题。现有方法在处理此类问题时,往往难以保证在存在扰动的情况下系统的安全性,尤其是在多智能体协同控制的复杂场景下。传统的Barrier函数方法可能过于保守,导致性能下降,或者难以处理高阶动力学系统。
核心思路:论文的核心思路是将鲁棒误差反馈与标称轨迹规划相结合。通过设计一个辅助反馈律,将系统的状态误差限制在一个鲁棒正不变(RPI)Tube内。然后,利用这个RPI Tube的几何信息,特别是其支持函数,来计算状态相关的安全裕度。这些安全裕度被用来收紧标称轨迹规划中的指数控制Barrier函数(eCBF)约束,从而确保即使在存在扰动的情况下,系统的实际轨迹也能保持安全。
技术框架:整体框架包含以下几个主要步骤:1) 设计标称轨迹规划器,该规划器基于模型预测控制(MPC),用于生成期望的系统轨迹。2) 设计鲁棒误差反馈控制器,该控制器能够将状态误差限制在RPI Tube内。3) 利用RPI Tube的几何信息计算状态相关的安全裕度。4) 使用这些安全裕度收紧标称轨迹规划器中的eCBF约束。5) 将收紧后的约束传递给MPC求解器,从而生成既能保证性能又能保证安全性的标称轨迹。
关键创新:最重要的技术创新点在于将RPI Tube的几何信息与eCBF约束相结合,实现了一种系统化的约束收紧方法。这种方法能够精确地量化扰动对系统安全性的影响,并据此调整安全约束,从而在保证安全性的同时,尽可能地提高系统的性能。与传统的保守方法相比,该方法能够更有效地利用系统的控制能力,实现更优的控制效果。
关键设计:关键设计包括:1) RPI Tube的设计,需要选择合适的反馈增益,以确保Tube的尺寸尽可能小,从而减少对性能的影响。2) eCBF的设计,需要选择合适的Barrier函数形式和参数,以确保安全约束的有效性。3) 约束收紧策略的设计,需要根据RPI Tube的几何信息,精确地计算状态相关的安全裕度,并将其用于收紧eCBF约束。
🖼️ 关键图片
📊 实验亮点
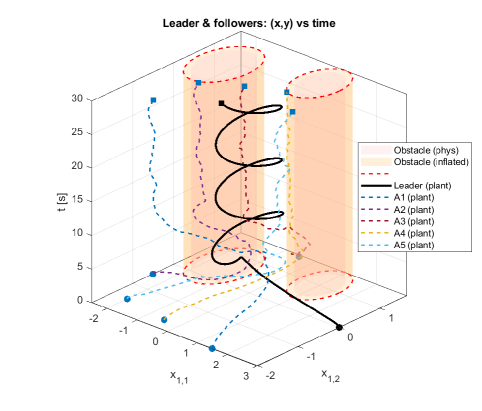
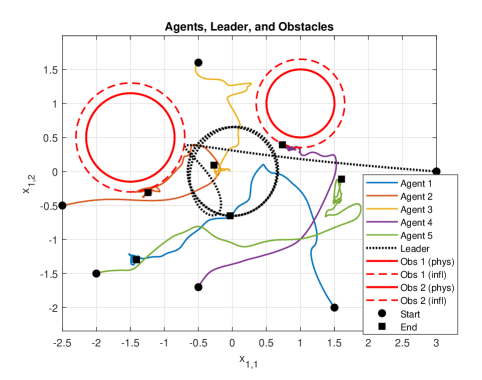
论文通过在分布式MPC框架下实施该规划器,验证了方法的有效性。实验结果表明,该方法能够在保证鲁棒安全性的同时优化性能。具体的性能数据和对比基线在论文中进行了详细的展示,证明了该方法相对于传统方法的优越性。
🎯 应用场景
该研究成果可应用于各种需要多智能体协同且对安全性有严格要求的领域,例如自动驾驶、无人机集群控制、机器人协作等。通过该方法,可以有效地提高这些系统在复杂环境下的鲁棒性和安全性,降低事故发生的风险,具有重要的实际应用价值和潜在的社会效益。
📄 摘要(原文)
This paper presents a constructive framework for synthesizing provably safe controllers for nonlinear multi-agent systems subject to bounded disturbances. The methodology applies to systems representable in Brunovsky canonical form, accommodating arbitrary-order dynamics in multi-dimensional spaces. The central contribution is a method of constraint tightening that formally couples robust error feedback with nominal trajectory planning. The key insight is that the design of an ancillary feedback law, which confines state errors to a robust positively invariant (RPI) tube, simultaneously provides the exact information needed to ensure the safety of the nominal plan. Specifically, the geometry of the resulting RPI tube is leveraged via its support function to derive state-dependent safety margins. These margins are then used to systematically tighten the high relative-degree exponential control barrier function (eCBF) constraints imposed on the nominal planner. This integrated synthesis guarantees that any nominal trajectory satisfying the tightened constraints corresponds to a provably safe trajectory for the true, disturbed system. We demonstrate the practical utility of this formal synthesis method by implementing the planner within a distributed Model Predictive Control (MPC) scheme, which optimizes performance while inheriting the robust safety guarantees.