Motion Planning with Precedence Specifications via Augmented Graphs of Convex Sets
作者: Shilin You, Gael Luna, Juned Shaikh, David Gostin, Yu Xiang, Justin Koeln, Tyler Summers
分类: eess.SY
发布日期: 2025-10-24
💡 一句话要点
提出基于增广凸集图的运动规划算法,解决带时序逻辑约束的轨迹规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 时序逻辑 凸集 增广图 机器人导航
📋 核心要点
- 现有运动规划方法在处理复杂时序逻辑约束时效率较低,难以满足实时性要求。
- 论文提出一种基于增广凸集图的运动规划方法,精确编码钥匙-门优先顺序,实现高效轨迹规划。
- 实验表明,该方法在钥匙-门迷宫环境中表现出色,速度比现有方法快几个数量级。
📝 摘要(中文)
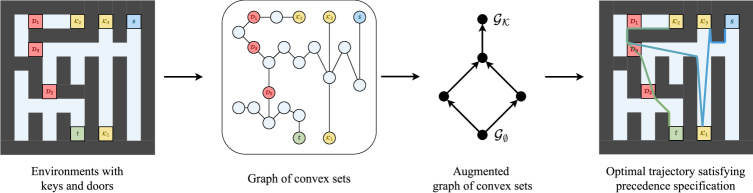
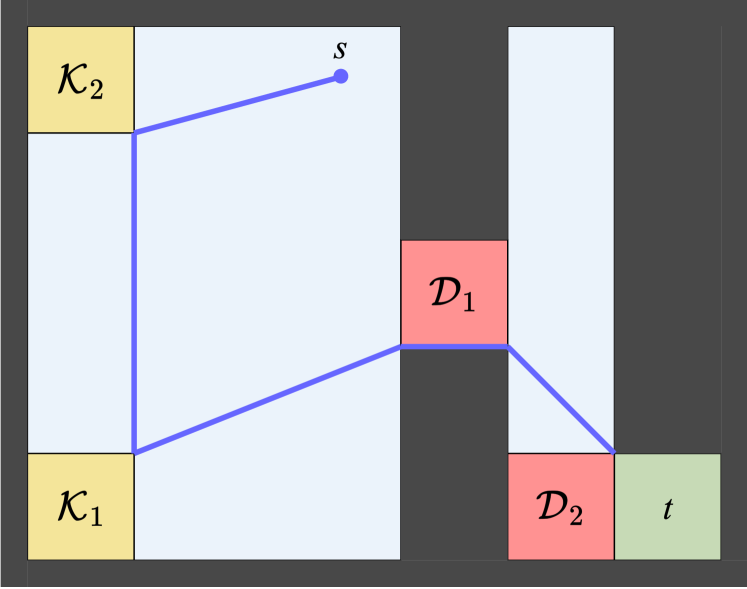
本文提出了一种轨迹规划算法,该算法能够避开障碍物并满足用信号时序逻辑片段表达的“钥匙-门”优先顺序规范。我们的方法包括一种新颖的精确凸划分方法,该方法对无障碍空间进行划分,并编码凸自由空间集合、钥匙集合和门集合之间的连通性。然后,我们构建一个增广的凸集图,该图精确地编码了“钥匙-门”优先顺序规范。通过解决这个增广凸集图中的最短路径问题,我们的流程提供了一个精确的解决方案,精度取决于轨迹的有限参数化。为了说明我们方法的有效性,我们提出了一种生成“钥匙-门”迷宫的方法,该方法提供了具有挑战性的问题实例,并且我们进行了数值实验来评估所提出的流程。我们的流程比最近使用通用时序逻辑工具的最先进方法快几个数量级。
🔬 方法详解
问题定义:论文旨在解决在存在障碍物和“钥匙-门”优先顺序约束下的运动规划问题。现有的通用时序逻辑工具在解决此类问题时计算复杂度高,效率低下,难以满足实时性要求。尤其是在复杂环境中,搜索空间巨大,导致规划时间过长。
核心思路:论文的核心思路是将自由空间划分为凸集,并构建一个增广图来编码这些凸集之间的连通性以及“钥匙-门”优先顺序约束。通过在这个增广图上寻找最短路径,可以高效地找到满足所有约束的轨迹。这种方法避免了直接在原始空间中搜索,从而降低了计算复杂度。
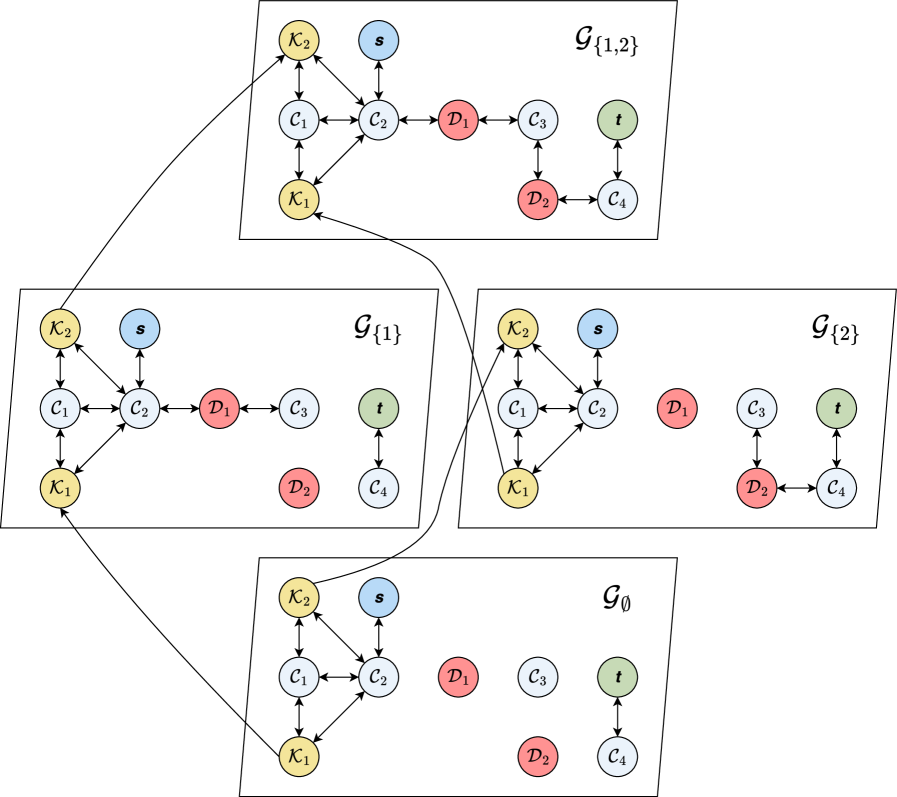
技术框架:该方法主要包含以下几个阶段: 1. 凸划分:将无障碍空间精确地划分为凸集,包括自由空间凸集、钥匙凸集和门凸集。 2. 增广图构建:构建一个增广的凸集图,其中节点代表凸集,边代表凸集之间的连通性。该图还编码了“钥匙-门”优先顺序约束,例如,必须先访问某个钥匙凸集才能访问相应的门凸集。 3. 最短路径搜索:在增广图上使用最短路径算法(例如 Dijkstra 算法或 A 算法)找到从起始凸集到目标凸集的最短路径。该路径对应于满足所有约束的轨迹。 4. 轨迹参数化*:将最短路径转化为具体的轨迹,例如使用样条曲线或多项式曲线进行参数化。
关键创新:该方法最重要的创新点在于使用增广图来精确编码“钥匙-门”优先顺序约束。与传统的基于采样的运动规划方法或通用时序逻辑工具相比,该方法能够更有效地利用约束信息,从而显著提高规划效率。此外,精确的凸划分也保证了规划结果的精确性。
关键设计: * 凸划分方法:论文采用了一种精确的凸划分方法,确保每个凸集都是凸的,并且所有凸集的并集等于整个自由空间。具体的划分算法可能依赖于环境的几何形状。 * 增广图的构建:增广图的节点表示凸集,边表示凸集之间的连通性。为了编码“钥匙-门”优先顺序约束,需要在图中添加额外的节点和边,以确保只有在访问了相应的钥匙节点后才能访问门节点。 * 最短路径算法:可以使用各种最短路径算法,例如 Dijkstra 算法或 A 算法。A 算法需要一个启发式函数来估计从当前节点到目标节点的距离。合适的启发式函数可以进一步提高搜索效率。 * 轨迹参数化:可以使用样条曲线或多项式曲线来参数化轨迹。参数化的目标是生成平滑且可执行的轨迹。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在钥匙-门迷宫环境中能够有效地规划出满足约束的轨迹,并且速度比使用通用时序逻辑工具的最先进方法快几个数量级。这表明该方法在处理带时序逻辑约束的运动规划问题时具有显著的优势。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、游戏AI等领域。例如,在仓库机器人中,可以规划机器人按照特定顺序访问不同的货架;在自动驾驶中,可以规划车辆按照交通规则和预定路线行驶;在游戏中,可以控制角色按照剧情要求完成任务。该方法能够提高运动规划的效率和可靠性,具有重要的实际应用价值。
📄 摘要(原文)
We present an algorithm for planning trajectories that avoid obstacles and satisfy key-door precedence specifications expressed with a fragment of signal temporal logic. Our method includes a novel exact convex partitioning of the obstacle free space that encodes connectivity among convex free space sets, key sets, and door sets. We then construct an augmented graph of convex sets that exactly encodes the key-door precedence specifications. By solving a shortest path problem in this augmented graph of convex sets, our pipeline provides an exact solution up to a finite parameterization of the trajectory. To illustrate the effectiveness of our approach, we present a method to generate key-door mazes that provide challenging problem instances, and we perform numerical experiments to evaluate the proposed pipeline. Our pipeline is faster by several orders of magnitude than recent state-of-the art methods that use general purpose temporal logic tools.