Control Barrier Functions for the Full Class of Signal Temporal Logic Tasks using Spatiotemporal Tubes
作者: Ratnangshu Das, Subhodeep Choudhury, Pushpak Jagtap
分类: eess.SY
发布日期: 2025-10-22
💡 一句话要点
提出基于时空管道的TV-CBF方法,解决全类信号时序逻辑任务的控制问题
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 信号时序逻辑 控制障碍函数 时空管道 鲁棒优化 自主系统
📋 核心要点
- 现有方法在处理复杂STL任务时效率较低,难以保证系统满足所有时序逻辑规范。
- 利用时空管道(STT)将STL规范转化为几何约束,并通过鲁棒优化问题求解STT,进而构建TV-CBF。
- 在移动机器人和四旋翼飞行器上验证了该框架,实验结果表明该方法比现有方法更有效。
📝 摘要(中文)
本文提出了一种新的框架,用于合成时变控制障碍函数(TV-CBF),以处理使用时空管道(STT)的一般信号时序逻辑(STL)规范。我们首先将STT合成公式化为一个鲁棒优化问题(ROP),并通过情景优化问题(SOP)解决它,从而提供形式化的保证,即生成的管道能够捕获给定的STL规范。然后,这些STT被用于构建TV-CBF,确保在任何使它们保持不变的控制律下,系统都满足STL任务。我们通过差动驱动移动机器人和四旋翼飞行器的案例研究展示了该框架,并提供了一个比较分析,表明其效率优于现有方法。
🔬 方法详解
问题定义:论文旨在解决如何为满足复杂信号时序逻辑(STL)规范的系统设计控制器的问题。现有的控制方法,尤其是在处理复杂的STL任务时,往往效率低下,难以保证系统在所有情况下都满足时序逻辑规范。这些方法可能需要大量的计算资源,并且可能无法很好地扩展到具有高维度状态空间的系统。
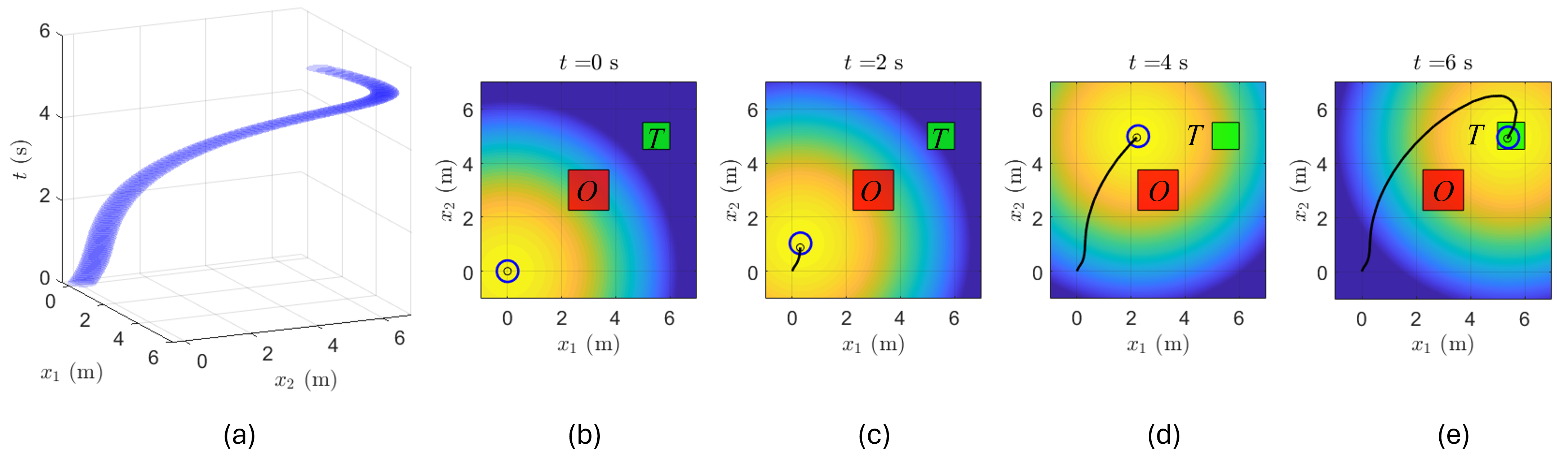
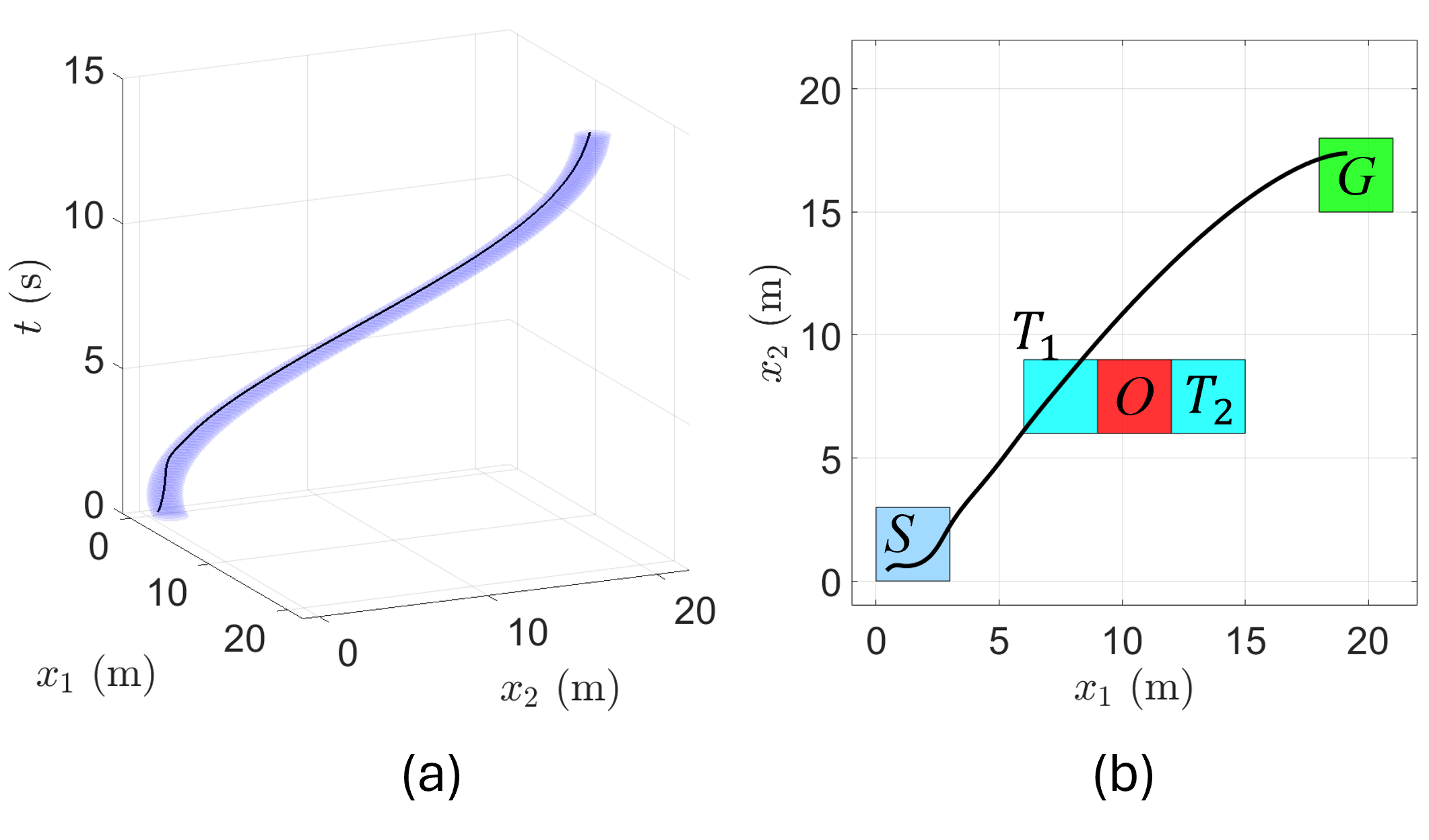
核心思路:论文的核心思路是将STL规范转化为时空管道(STT)的概念,即系统状态在时间和空间上的可行轨迹集合。通过确保系统轨迹始终位于这些管道内,可以保证系统满足给定的STL规范。论文利用控制障碍函数(CBF)来强制系统轨迹保持在STT内,从而实现对STL任务的控制。
技术框架:该框架主要包含以下几个阶段:1) 将STL规范转化为STT的几何约束;2) 将STT的合成问题建模为鲁棒优化问题(ROP);3) 通过情景优化问题(SOP)求解ROP,得到满足STL规范的STT;4) 基于STT构建时变控制障碍函数(TV-CBF);5) 设计控制律,使TV-CBF保持不变,从而保证系统满足STL任务。
关键创新:该论文的关键创新在于使用时空管道(STT)来表示STL规范,并将STT的合成问题建模为鲁棒优化问题。这种方法能够有效地处理复杂的STL任务,并提供形式化的保证,即系统满足给定的STL规范。与现有方法相比,该方法在效率和可扩展性方面具有优势。
关键设计:论文中,STT的形状和大小由一组参数控制,这些参数通过求解鲁棒优化问题来确定。鲁棒优化问题旨在找到一组参数,使得在所有可能的情景下,STT都能够捕获给定的STL规范。情景优化问题用于近似求解鲁棒优化问题,从而降低计算复杂度。TV-CBF的设计基于STT的边界,确保系统状态始终位于STT内部。
🖼️ 关键图片
📊 实验亮点
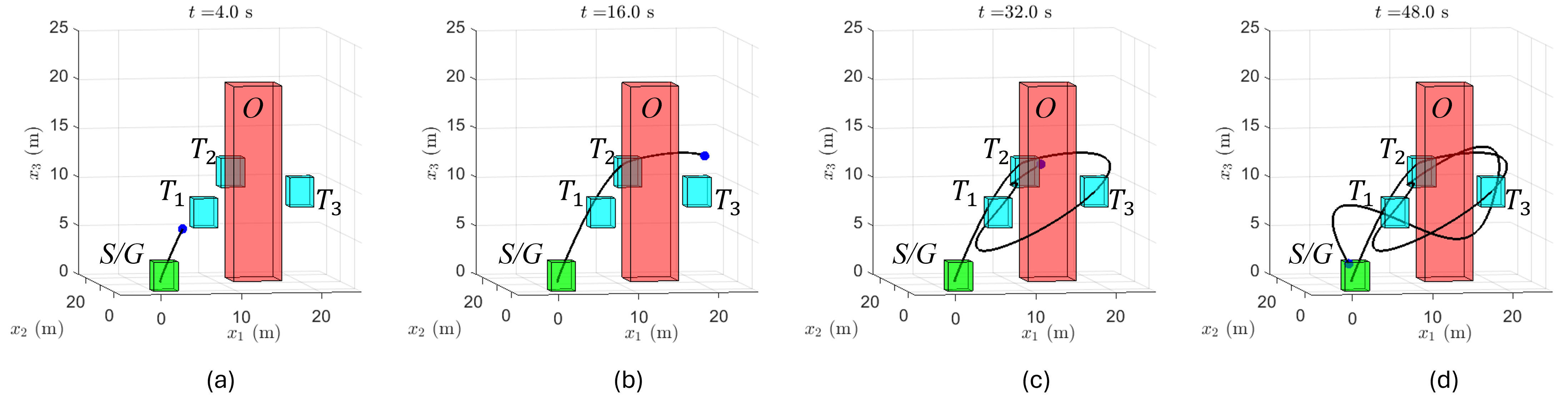
论文通过在差动驱动移动机器人和四旋翼飞行器上的案例研究验证了该框架的有效性。实验结果表明,与现有方法相比,该方法在满足STL规范的同时,能够显著提高控制效率。具体性能提升数据在论文中进行了详细的比较分析,表明该方法具有明显的优势。
🎯 应用场景
该研究成果可应用于各种需要满足复杂时序逻辑规范的自主系统,例如自动驾驶汽车、无人机集群、机器人协作等。通过该方法,可以确保这些系统在复杂环境中安全可靠地执行任务,并满足各种约束条件,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
This paper introduces a new framework for synthesizing time-varying control barrier functions (TV-CBFs) for general Signal Temporal Logic (STL) specifications using spatiotemporal tubes (STT). We first formulate the STT synthesis as a robust optimization problem (ROP) and solve it through a scenario optimization problem (SOP), providing formal guarantees that the resulting tubes capture the given STL specifications. These STTs are then used to construct TV-CBFs, ensuring that under any control law rendering them invariant, the system satisfies the STL tasks. We demonstrate the framework through case studies on a differential-drive mobile robot and a quadrotor, and provide a comparative analysis showing improved efficiency over existing approaches.