Spatiotemporal Tubes based Control of Unknown Multi-Agent Systems for Temporal Reach-Avoid-Stay Tasks
作者: Ahan Basu, Ratnangshu Das, Pushpak Jagtap
分类: eess.SY
发布日期: 2025-10-22
💡 一句话要点
针对未知多智能体系统,提出基于时空管道的控制方法,解决时序可达-避碰-停留任务。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 多智能体系统 时空管道 鲁棒优化 场景优化 时序控制 可达-避碰-停留 未知动力学
📋 核心要点
- 现有方法难以处理未知动力学多智能体系统的时序可达-避碰-停留任务,尤其是在存在时变不安全区域和智能体间碰撞风险时。
- 论文提出基于时空管道(STT)的控制策略,通过鲁棒优化和场景优化,生成满足任务需求且避免碰撞的STT。
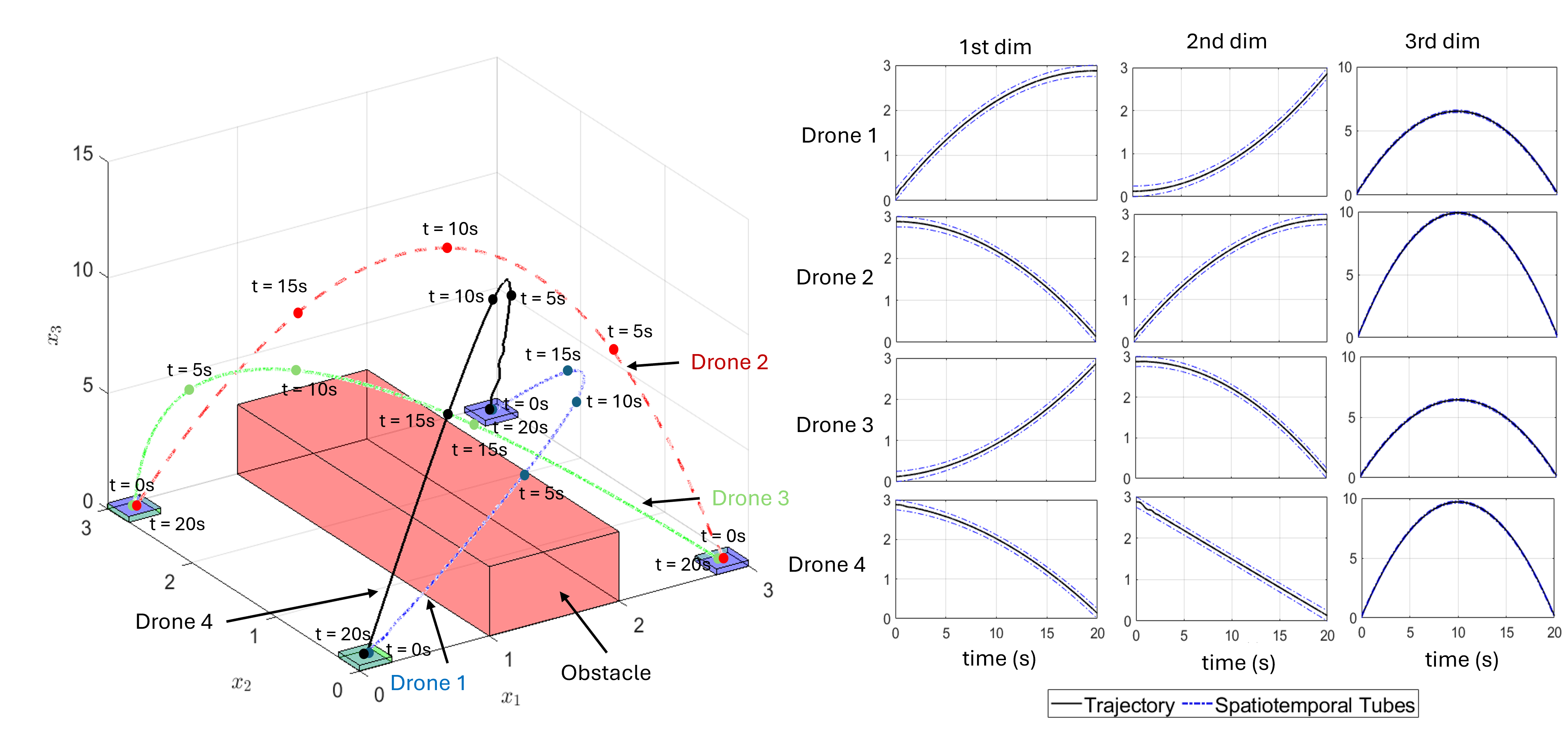
- 通过全向机器人和无人机系统的案例研究,验证了所提出方法的有效性,表明其能够实现安全、高效的多智能体协同控制。
📝 摘要(中文)
本文旨在为未知动力学多智能体系统设计控制器,以实现每个智能体的时序可达-避碰-停留任务,同时防止智能体间的碰撞。主要目标是为每个智能体生成时空管道(STT),并由此设计一种闭式、无近似且去中心化的控制策略,确保系统轨迹在特定时间内到达目标,同时避开时变不安全区域以及与其他智能体的碰撞。为了实现这一目标,论文将STT的需求形式化为一个鲁棒优化问题(ROP),并使用基于采样的场景优化问题(SOP)来解决ROP中无限约束导致不可行的问题。通过求解SOP生成STT,并设计相应的闭式控制以完成指定的任务。最后,通过两个案例研究验证了该方法的有效性,一个是全向机器人,另一个是建模为欧拉-拉格朗日系统的多架无人机。
🔬 方法详解
问题定义:论文旨在解决未知动力学多智能体系统在时变不安全区域中,如何实现每个智能体的时序可达-避碰-停留任务,并避免智能体间的碰撞。现有方法在处理未知动力学、时变约束以及多智能体间的复杂交互时存在局限性,难以保证任务完成的安全性和效率。
核心思路:论文的核心思路是为每个智能体生成一个时空管道(STT),该管道定义了智能体在时间和空间上的安全轨迹。通过控制智能体始终位于其STT内部,可以保证其在指定时间内到达目标区域,同时避开不安全区域和其他智能体。这种方法将复杂的时序控制问题转化为STT的生成和跟踪问题。
技术框架:整体框架包含以下几个主要步骤:1) 任务定义:明确每个智能体的目标区域、不安全区域以及时间约束。2) STT生成:将STT的需求形式化为鲁棒优化问题(ROP),考虑到ROP的无限约束,采用基于采样的场景优化问题(SOP)进行求解,生成满足约束条件的STT。3) 控制策略设计:基于生成的STT,设计闭式控制策略,确保智能体始终位于其STT内部。4) 仿真验证:通过仿真实验验证所提出方法的有效性。
关键创新:论文的关键创新在于将时序可达-避碰-停留任务转化为STT的生成和跟踪问题,并采用鲁棒优化和场景优化相结合的方法来解决STT生成中的不确定性和复杂性。与现有方法相比,该方法能够处理未知动力学系统,并保证在存在时变约束和智能体间碰撞风险的情况下,任务的安全完成。
关键设计:在STT生成过程中,需要仔细选择采样策略,以保证SOP的解能够有效地逼近ROP的解。控制策略的设计需要保证智能体能够快速、准确地跟踪STT,同时考虑到控制输入的约束。鲁棒优化问题中的不确定性集合需要根据实际情况进行选择,以保证控制器的鲁棒性。
🖼️ 关键图片

📊 实验亮点
论文通过全向机器人和无人机系统的仿真实验验证了所提出方法的有效性。实验结果表明,该方法能够成功生成满足任务需求的STT,并设计出相应的控制策略,使得智能体能够在指定时间内到达目标区域,同时避开不安全区域和其他智能体。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于无人机集群协同、自动驾驶车辆编队、机器人协作等领域。在这些场景中,多个智能体需要在复杂的环境中协同完成任务,同时保证安全性和效率。该方法能够为这些应用提供一种可靠的控制策略,具有重要的实际应用价值和未来发展潜力。
📄 摘要(原文)
The paper focuses on designing a controller for unknown dynamical multi-agent systems to achieve temporal reach-avoid-stay tasks for each agent while preventing inter-agent collisions. The main objective is to generate a spatiotemporal tube (STT) for each agent and thereby devise a closed-form, approximation-free, and decentralized control strategy that ensures the system trajectory reaches the target within a specific time while avoiding time-varying unsafe sets and collisions with other agents. In order to achieve this, the requirements of STTs are formulated as a robust optimization problem (ROP) and solved using a sampling-based scenario optimization problem (SOP) to address the issue of infeasibility caused by the infinite number of constraints in ROP. The STTs are generated by solving the SOP, and the corresponding closed-form control is designed to fulfill the specified task. Finally, the effectiveness of our approach is demonstrated through two case studies, one involving omnidirectional robots and the other involving multiple drones modelled as Euler-Lagrange systems.