Trajectory Optimization for Minimum Threat Exposure using Physics-Informed Neural Networks
作者: Alexandra E. Ballentine, Raghvendra V. Cowlagi
分类: eess.SY
发布日期: 2025-10-20 (更新: 2025-10-24)
备注: 2025 Indian Control Conference
💡 一句话要点
利用物理信息神经网络优化轨迹,最小化威胁暴露
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 物理信息神经网络 轨迹优化 最优控制 庞特里亚金最小值原理 两点边值问题
📋 核心要点
- 传统打靶法求解最优控制中的两点边值问题(BVP)时,对初始值敏感,难以收敛。
- 提出使用物理信息神经网络(PINN)直接求解BVP,避免了传统方法对初始值的依赖。
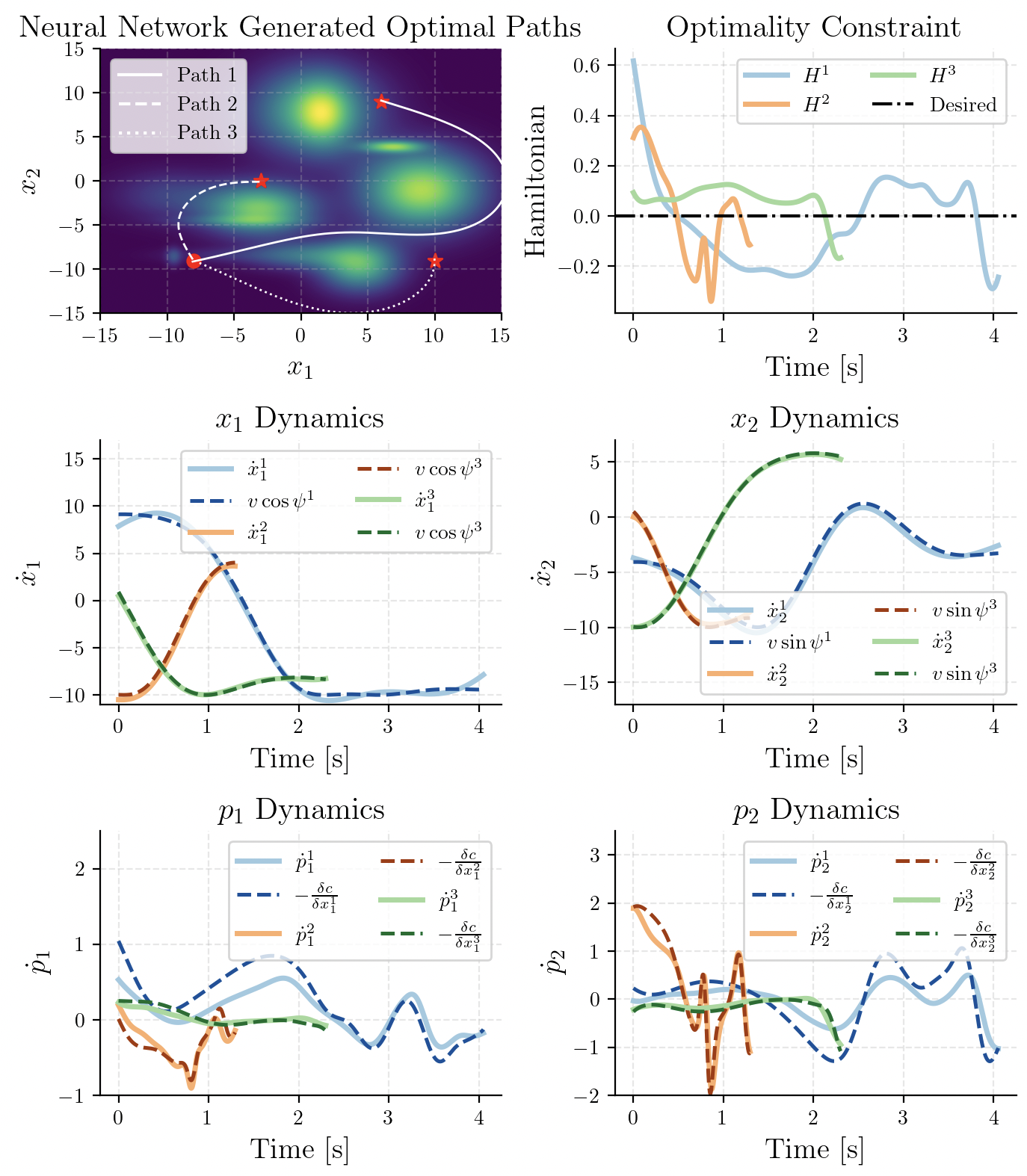
- 实验表明,该PINN能够以较低的数值误差满足庞特里亚金最小值原理的必要条件。
📝 摘要(中文)
本文应用物理信息神经网络(PINN)解决由庞特里亚金最小值原理导出的最优控制必要条件产生的两点边值问题(BVP)。众所周知,由于对初始猜测的极高敏感性,传统的打靶法在数值上难以解决此类BVP。鉴于PINN在解决高维微分方程方面的最新成功,我们开发了一种PINN,用于解决车辆运动学模型在时空威胁下寻找最小暴露轨迹的问题。首先,我们实现了PINN,该PINN经过训练,可以针对给定威胁场的给定初始和最终状态对解决BVP。接下来,我们实现了一个以给定威胁场的初始状态为条件的PINN,从而无需为每个初始状态重新训练。我们证明了PINN的输出以较低的数值误差满足必要条件。
🔬 方法详解
问题定义:论文旨在解决在存在时空威胁场的情况下,如何为车辆规划一条轨迹,使得车辆在整个轨迹上的威胁暴露最小。传统方法,如打靶法,在求解由此产生的两点边值问题时,由于对初始猜测值的高度敏感性,经常难以收敛,计算成本高昂。
核心思路:论文的核心思路是利用物理信息神经网络(PINN)直接学习满足最优控制必要条件的状态和伴随状态。PINN通过将物理方程(即最优控制的必要条件)嵌入到神经网络的损失函数中,从而在训练过程中约束神经网络的输出,使其满足这些物理规律。这样,就可以避免传统方法中对初始值的敏感性问题。
技术框架:整体框架包含以下几个主要步骤:1) 定义车辆的运动学模型和威胁场;2) 根据庞特里亚金最小值原理,推导出最优控制的必要条件,形成两点边值问题;3) 构建PINN,其输入为时间和状态,输出为状态和伴随状态;4) 定义损失函数,包括物理损失(即必要条件)和边界条件损失;5) 使用优化算法(如Adam)训练PINN;6) 使用训练好的PINN预测最优轨迹。论文中还提出了两种PINN结构:一种是针对特定初始和最终状态训练的PINN,另一种是以初始状态为条件训练的PINN,后者可以泛化到不同的初始状态。
关键创新:最重要的技术创新点在于将PINN应用于求解最优控制中的两点边值问题。与传统方法相比,PINN不需要迭代求解,避免了对初始值的敏感性,并且可以并行计算,具有更高的效率。此外,以初始状态为条件训练的PINN具有更好的泛化能力,可以适应不同的初始状态。
关键设计:关键的技术细节包括:1) 神经网络的结构:论文中使用了多层感知机(MLP)作为PINN的基本结构;2) 损失函数的设计:损失函数包括物理损失和边界条件损失,其中物理损失衡量PINN输出满足最优控制必要条件的程度,边界条件损失衡量PINN输出满足初始和最终状态的程度;3) 优化算法的选择:论文中使用了Adam优化算法来训练PINN;4) 威胁场的建模:威胁场被建模为一个时空函数,用于表示不同位置和时间点的威胁程度。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了PINN在求解最优控制问题中的有效性。实验结果表明,PINN的输出能够以较低的数值误差满足庞特里亚金最小值原理的必要条件,证明了该方法的可行性。虽然论文中没有给出具体的性能数据和对比基线,但其核心贡献在于提供了一种新的求解最优控制问题的方法,为后续研究奠定了基础。
🎯 应用场景
该研究成果可应用于无人机路径规划、机器人运动规划、自动驾驶等领域,尤其是在需要考虑环境威胁因素的场景下。通过优化轨迹,可以降低飞行器或机器人在危险区域的暴露时间,提高安全性。未来,该方法可以扩展到更复杂的动力学模型和威胁环境,为智能系统的安全可靠运行提供保障。
📄 摘要(原文)
We apply a physics-informed neural network (PINN) to solve the two-point boundary value problem (BVP) arising from the necessary conditions postulated by Pontryagin's Minimum Principle for optimal control. Such BVPs are known to be numerically difficult to solve by traditional shooting methods due to extremely high sensitivity to initial guesses. In the light of recent successes in applying PINNs for solving high-dimensional differential equations, we develop a PINN to solve the problem of finding trajectories with minimum exposure to a spatiotemporal threat for a vehicle kinematic model. First, we implement PINNs that are trained to solve the BVP for a given pair of initial and final states for a given threat field. Next, we implement a PINN conditioned on the initial state for a given threat field, which eliminates the need for retraining for each initial state. We demonstrate that the PINN outputs satisfy the necessary conditions with low numerical error.