Semantic Intelligence: A Bio-Inspired Cognitive Framework for Embodied Agents
作者: Wenbing Tang, Meilin Zhu, Fenghua Wu, Yang Liu
分类: eess.SY
发布日期: 2025-10-20
💡 一句话要点
提出SIDE框架,通过语义智能提升具身智能体在复杂环境中的交互能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 语义智能 认知架构 决策过程 生物启发 人工智能 机器人
📋 核心要点
- 现有具身智能体在复杂真实环境中表现不足,主要原因是缺乏足够的语义智能,难以理解和推理复杂任务。
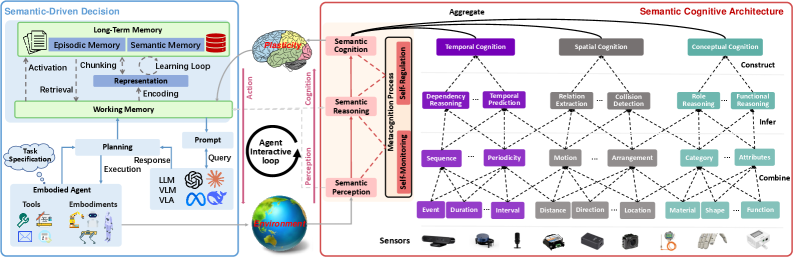
- SIDE框架通过整合分层语义认知架构和语义驱动的决策过程,使智能体具备情境自适应的推理和交互能力。
- 该框架受到生物认知机制的启发,旨在模仿生物体整合和处理感觉信息的方式,提升智能体的通用性和智能水平。
📝 摘要(中文)
大型语言模型(LLMs)的最新进展极大地提升了自然语言理解和内容生成能力。然而,这些模型主要在脱离物理世界的数字环境中运行,缺乏与现实世界的交互。为了解决这一局限性,具身人工智能(EAI)应运而生,它专注于能够感知并与其环境交互的智能体。尽管取得了一些进展,但由于缺乏足够的语义智能,当前的具身智能体在非结构化的真实世界环境中面临着挑战,而语义智能对于理解和推理复杂任务至关重要。本文介绍了一种语义智能驱动的具身(SIDE)智能体框架,该框架集成了分层语义认知架构和语义驱动的决策过程。这使得智能体能够以情境自适应的方式推理并与物理世界交互。该框架受到生物认知机制的启发,并利用生物启发原则来设计一种语义认知架构,该架构模仿人类和动物整合和处理感觉信息的方式。我们将此框架视为开发更智能和通用的具身智能体的一步。
🔬 方法详解
问题定义:现有具身智能体在非结构化的真实世界环境中面临挑战,它们缺乏足够的语义智能,难以理解和推理复杂任务。现有方法难以有效地将感知信息与高级语义知识相结合,导致智能体在复杂环境中难以做出合理的决策。
核心思路:SIDE框架的核心思路是赋予具身智能体更强的语义理解和推理能力,使其能够像人类一样,基于对环境的语义理解进行决策。通过模仿生物认知机制,构建一个能够整合感觉信息和语义知识的认知架构。
技术框架:SIDE框架包含一个分层语义认知架构和一个语义驱动的决策过程。分层语义认知架构负责将原始感知数据转化为高级语义表示,并进行知识推理。语义驱动的决策过程则利用这些语义信息来制定行动计划,并与环境进行交互。整体流程是从感知输入到语义理解,再到决策输出。
关键创新:SIDE框架的关键创新在于其语义认知架构的设计,该架构受到生物认知机制的启发,能够有效地整合不同层次的感知信息,并进行语义推理。此外,语义驱动的决策过程能够根据环境的语义信息进行自适应的决策,提高了智能体的鲁棒性和泛化能力。
关键设计:具体的参数设置、损失函数和网络结构等技术细节在论文中未详细描述,属于未知信息。但可以推测,语义认知架构可能包含多层神经网络,用于提取不同层次的语义特征。决策过程可能采用强化学习或规划算法,以优化智能体的行为策略。
🖼️ 关键图片


📊 实验亮点
由于论文摘要中没有提供具体的实验结果和性能数据,因此无法总结实验亮点。需要阅读完整论文才能了解SIDE框架的具体性能表现和与其他基线的对比情况。
🎯 应用场景
SIDE框架具有广泛的应用前景,例如在智能家居、自动驾驶、机器人辅助医疗等领域。它可以使智能体更好地理解人类指令,并在复杂环境中自主完成任务。未来,该框架有望推动具身智能体在更多实际场景中的应用,提高其智能化水平和服务能力。
📄 摘要(原文)
Recent advancements in Large Language Models (LLMs) have greatly enhanced natural language understanding and content generation. However, these models primarily operate in disembodied digital environments and lack interaction with the physical world. To address this limitation, Embodied Artificial Intelligence (EAI) has emerged, focusing on agents that can perceive and interact with their surroundings. Despite progress, current embodied agents face challenges in unstructured real-world environments due to insufficient semantic intelligence, which is critical for understanding and reasoning about complex tasks. This paper introduces the Semantic Intelligence-Driven Embodied (SIDE) agent framework, which integrates a hierarchical semantic cognition architecture with a semantic-driven decision-making process. This enables agents to reason about and interact with the physical world in a contextually adaptive manner. The framework is inspired by biological cognitive mechanisms and utilizes bio-inspired principles to design a semantic cognitive architecture that mimics how humans and animals integrate and process sensory information. We present this framework as a step toward developing more intelligent and versatile embodied agents.