Safe Payload Transfer with Ship-Mounted Cranes: A Robust Model Predictive Control Approach
作者: Ersin Das, William A. Welch, Patrick Spieler, Keenan Albee, Aurelio Noca, Jeffrey Edlund, Jonathan Becktor, Thomas Touma, Jessica Todd, Sriramya Bhamidipati, Stella Kombo, Maira Saboia, Anna Sabel, Grace Lim, Rohan Thakker, Amir Rahmani, Joel W. Burdick
分类: eess.SY, cs.RO
发布日期: 2025-10-19
💡 一句话要点
提出基于鲁棒MPC的船载起重机安全有效载荷转移方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 船载起重机 模型预测控制 鲁棒控制 控制障碍函数 安全控制
📋 核心要点
- 船载起重机在恶劣海况下作业,易受外部扰动影响,传统控制方法难以保证载荷转移的安全性和精度。
- 提出基于鲁棒模型预测控制(MPC)的框架,结合鲁棒零阶控制障碍函数(R-ZOCBF)和在线鲁棒性参数自适应方案。
- 实验表明,该方法在显著扰动下能安全地将载荷转移到目标区域,并有效避免碰撞。
📝 摘要(中文)
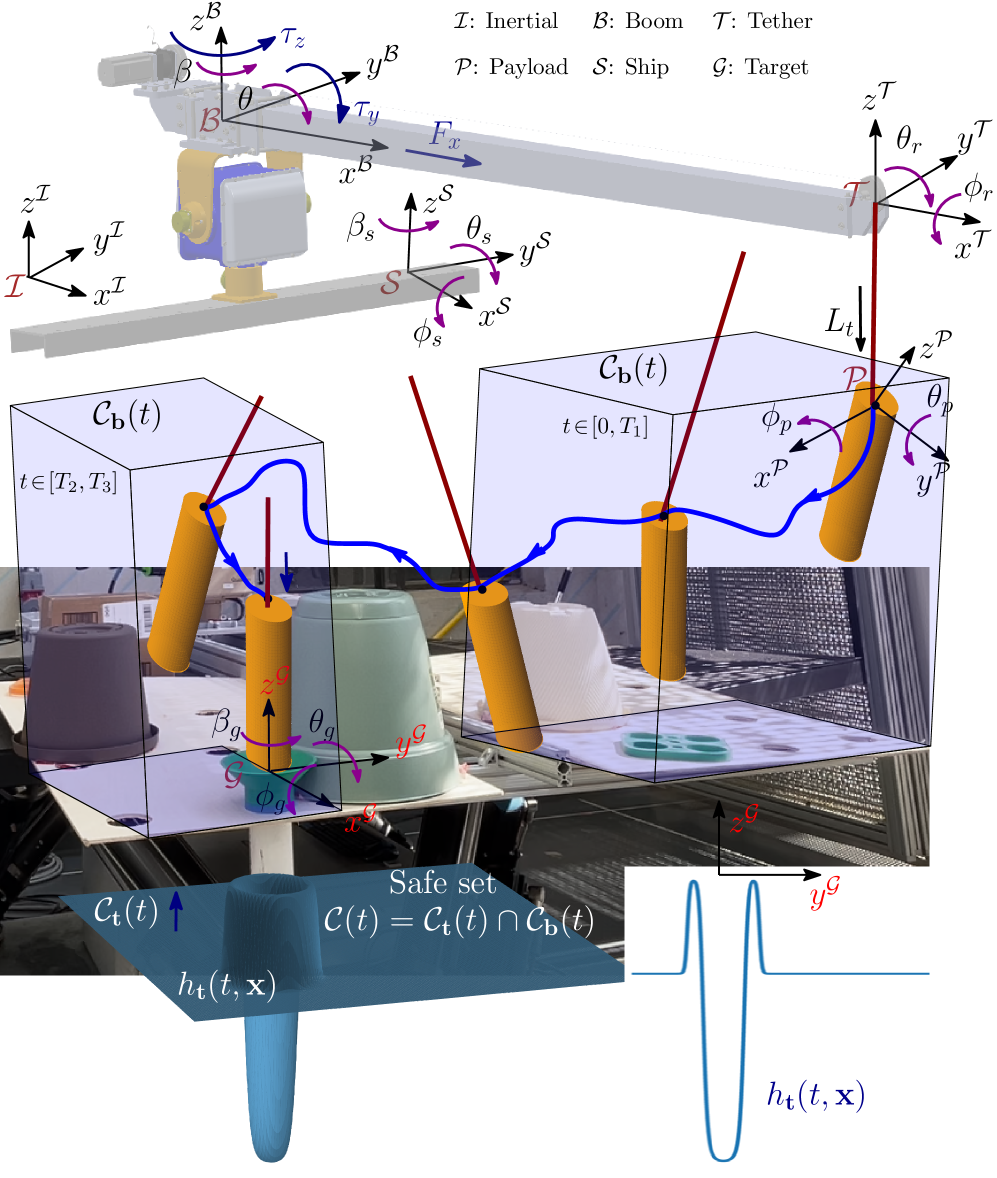
本文提出了一种鲁棒且安全的模型预测控制(MPC)框架,用于解决非结构化运输环境中船载起重机的安全实时控制问题。与传统起重机系统不同,船载起重机持续受到显著的外部扰动,这些扰动源于船舶在恶劣海况下的动态运动响应,影响了欠驱动起重机的动力学,可能导致鲁棒性问题。该方法在一个5自由度起重机系统上进行了验证,该系统使用Stewart平台模拟海洋表面运动对支撑船只的外部扰动。起重机有效载荷转移操作必须避开障碍物,并将有效载荷精确放置在指定的目标区域内。在非线性MPC中,使用基于鲁棒零阶控制障碍函数(R-ZOCBF)的安全约束来确保有效载荷的安全定位,同时使用时变边界框进行避碰。引入了一种新的基于优化的在线鲁棒性参数自适应方案,以减少R-ZOCBF的保守性。起重机原型上的实验结果表明了该安全控制方法在起重机底座受到显著扰动运动下的整体性能。虽然重点是起重机辅助转移,但该方法更普遍地适用于安全的机器人辅助零件配合和零件插入。
🔬 方法详解
问题定义:船载起重机在海洋环境中进行有效载荷转移时,面临着船舶运动带来的外部扰动,这使得起重机的控制变得复杂。传统的控制方法难以同时保证载荷转移的安全性和精度,容易发生碰撞或目标位置偏差。现有方法的痛点在于无法有效地处理这些不确定性和约束条件,导致控制性能下降。
核心思路:本文的核心思路是利用鲁棒模型预测控制(MPC)框架,结合鲁棒零阶控制障碍函数(R-ZOCBF)来保证系统的安全性,并通过在线鲁棒性参数自适应方案来减少R-ZOCBF的保守性。这种设计旨在在保证安全性的前提下,尽可能地提高控制性能。
技术框架:整体框架包括以下几个主要模块:1) 状态估计模块,用于估计起重机的状态和外部扰动;2) 模型预测控制模块,基于起重机的动力学模型和约束条件,预测未来一段时间内的状态轨迹;3) 鲁棒零阶控制障碍函数(R-ZOCBF)模块,用于生成安全约束,防止碰撞和目标位置偏差;4) 在线鲁棒性参数自适应模块,用于动态调整R-ZOCBF的参数,以减少其保守性。
关键创新:最重要的技术创新点在于提出了一个基于优化的在线鲁棒性参数自适应方案,该方案能够根据当前的状态和扰动情况,动态地调整R-ZOCBF的参数,从而在保证安全性的前提下,尽可能地提高控制性能。与现有方法相比,该方案能够更有效地处理不确定性和约束条件,从而提高控制系统的鲁棒性和适应性。
关键设计:R-ZOCBF的设计是关键,它需要保证在所有可能的状态下,系统都能够满足安全约束。在线鲁棒性参数自适应方案的设计也至关重要,它需要能够快速、准确地调整R-ZOCBF的参数,以适应不同的状态和扰动情况。此外,MPC的预测时域和控制时域的选择也会影响控制性能,需要根据具体的应用场景进行调整。
🖼️ 关键图片
📊 实验亮点
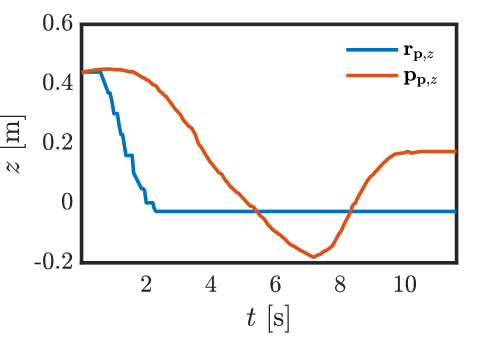
实验结果表明,所提出的鲁棒MPC方法在显著扰动下能够安全地将载荷转移到目标区域,并有效避免碰撞。通过在线鲁棒性参数自适应方案,R-ZOCBF的保守性得到了有效降低,从而提高了控制性能。具体性能数据(如定位精度、避碰成功率等)未在摘要中明确给出,但强调了该方法在实际起重机原型上的有效性。
🎯 应用场景
该研究成果可广泛应用于海洋工程、港口自动化、以及其他需要在复杂环境中进行精确操作的领域。例如,它可以用于在海上平台之间转移物资,在恶劣天气条件下进行水下作业,以及在自动化港口中进行集装箱的装卸。该方法能够提高作业效率,降低安全风险,并为未来的智能海洋装备发展提供技术支持。
📄 摘要(原文)
Ensuring safe real-time control of ship-mounted cranes in unstructured transportation environments requires handling multiple safety constraints while maintaining effective payload transfer performance. Unlike traditional crane systems, ship-mounted cranes are consistently subjected to significant external disturbances affecting underactuated crane dynamics due to the ship's dynamic motion response to harsh sea conditions, which can lead to robustness issues. To tackle these challenges, we propose a robust and safe model predictive control (MPC) framework and demonstrate it on a 5-DOF crane system, where a Stewart platform simulates the external disturbances that ocean surface motions would have on the supporting ship. The crane payload transfer operation must avoid obstacles and accurately place the payload within a designated target area. We use a robust zero-order control barrier function (R-ZOCBF)-based safety constraint in the nonlinear MPC to ensure safe payload positioning, while time-varying bounding boxes are utilized for collision avoidance. We introduce a new optimization-based online robustness parameter adaptation scheme to reduce the conservativeness of R-ZOCBFs. Experimental trials on a crane prototype demonstrate the overall performance of our safe control approach under significant perturbing motions of the crane base. While our focus is on crane-facilitated transfer, the methods more generally apply to safe robotically-assisted parts mating and parts insertion.