Robust Closed-Form Control for MIMO Nonlinear Systems under Conflicting Time-Varying Hard and Soft Constraints (extended version)
作者: Farhad Mehdifar, Charalampos P. Bechlioulis, Dimos V. Dimarogonas
分类: eess.SY, math.DS
发布日期: 2025-10-13 (更新: 2025-10-17)
备注: 18 pages, 6 figures
💡 一句话要点
提出一种鲁棒闭环控制方法,解决MIMO非线性系统时变硬约束和软约束冲突问题。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 非线性控制 多输入多输出系统 时变约束 硬约束 软约束 鲁棒控制 倒数障碍函数
📋 核心要点
- 现有方法难以在不确定MIMO非线性系统中同时处理时变硬约束和软约束,尤其是在约束冲突时。
- 该论文提出一种闭环控制律,利用倒数障碍和非线性变换函数,将约束转化为控制目标,并动态调整软约束优先级。
- 仿真结果验证了所提控制律的有效性,能够在满足硬约束的同时,尽可能优化软约束,且计算复杂度较低。
📝 摘要(中文)
本文提出了一种新颖的鲁棒闭环控制律,用于处理不确定高相对阶非线性MIMO系统中时变硬约束和软约束。这些约束代表机械系统操作空间中的时空规范,其中硬约束确保安全关键需求,软约束编码性能或任务目标。最初,所有约束被整合为两个独立的标量时变硬约束和软约束函数,其正水平集定义了可行区域。开发了一种闭环控制律,通过适当设计的倒数障碍和非线性变换函数来执行这些约束。当硬约束和软约束之间发生冲突时,控制律通过动态松弛律虚拟地放松软约束,从而优先考虑硬约束。值得注意的是,所提出的控制律通过避免用于应对系统不确定性的近似方案来保持低复杂性。仿真结果证实了该方法的有效性。
🔬 方法详解
问题定义:论文旨在解决具有不确定性的高相对阶多输入多输出(MIMO)非线性系统在同时存在时变硬约束和软约束情况下的控制问题。硬约束代表必须严格满足的安全关键需求,而软约束则代表期望的性能或任务目标。现有方法通常难以在保证硬约束满足的同时优化软约束,尤其是在约束之间存在冲突时,或者需要复杂的近似方法来处理系统的不确定性。
核心思路:论文的核心思路是将所有约束整合为两个标量时变函数,分别代表硬约束和软约束。通过设计合适的倒数障碍函数和非线性变换函数,将这些约束转化为控制律的设计目标。当硬约束和软约束发生冲突时,控制律优先保证硬约束的满足,并通过动态松弛软约束的方式来解决冲突。这种方法避免了复杂的优化过程和对系统不确定性的精确建模。
技术框架:整体框架包括以下几个主要步骤:1. 将所有硬约束和软约束分别整合为两个标量时变函数。2. 设计倒数障碍函数,确保系统状态保持在硬约束定义的可行区域内。3. 设计非线性变换函数,将软约束转化为控制目标。4. 设计动态松弛律,在硬约束和软约束冲突时,动态调整软约束的优先级。5. 基于以上设计,构建闭环控制律。
关键创新:该论文的关键创新在于提出了一种闭环控制律,能够在不确定MIMO非线性系统中同时处理时变硬约束和软约束,并在约束冲突时优先保证硬约束的满足。此外,该方法避免了使用复杂的近似方案来处理系统的不确定性,从而降低了计算复杂度。动态松弛律的设计也是一个创新点,它能够根据约束冲突的程度动态调整软约束的优先级。
关键设计:关键设计包括:1. 倒数障碍函数的具体形式,需要保证系统状态始终保持在硬约束定义的可行区域内。2. 非线性变换函数的选择,需要能够将软约束转化为易于控制的目标。3. 动态松弛律的设计,需要能够根据约束冲突的程度动态调整软约束的优先级,同时保证系统的稳定性。这些函数和参数的具体选择会影响控制律的性能和鲁棒性。
🖼️ 关键图片
📊 实验亮点
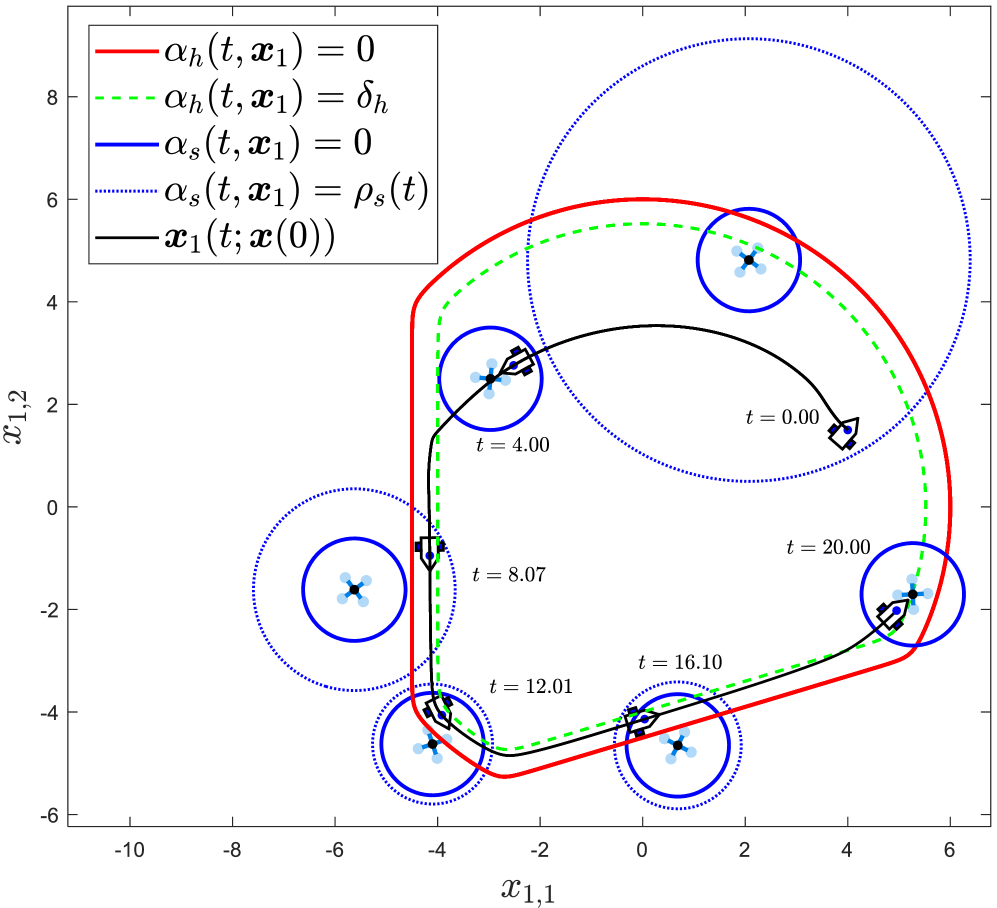
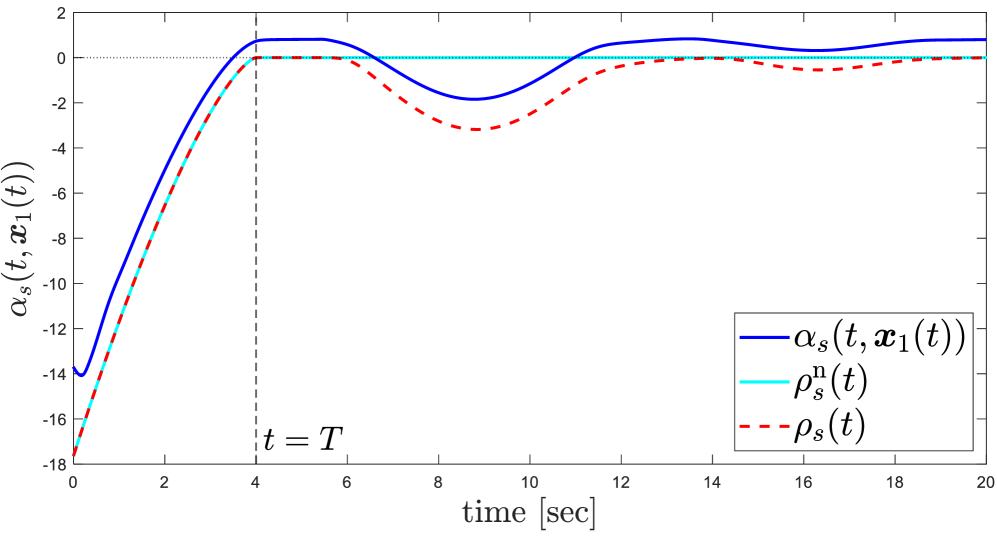
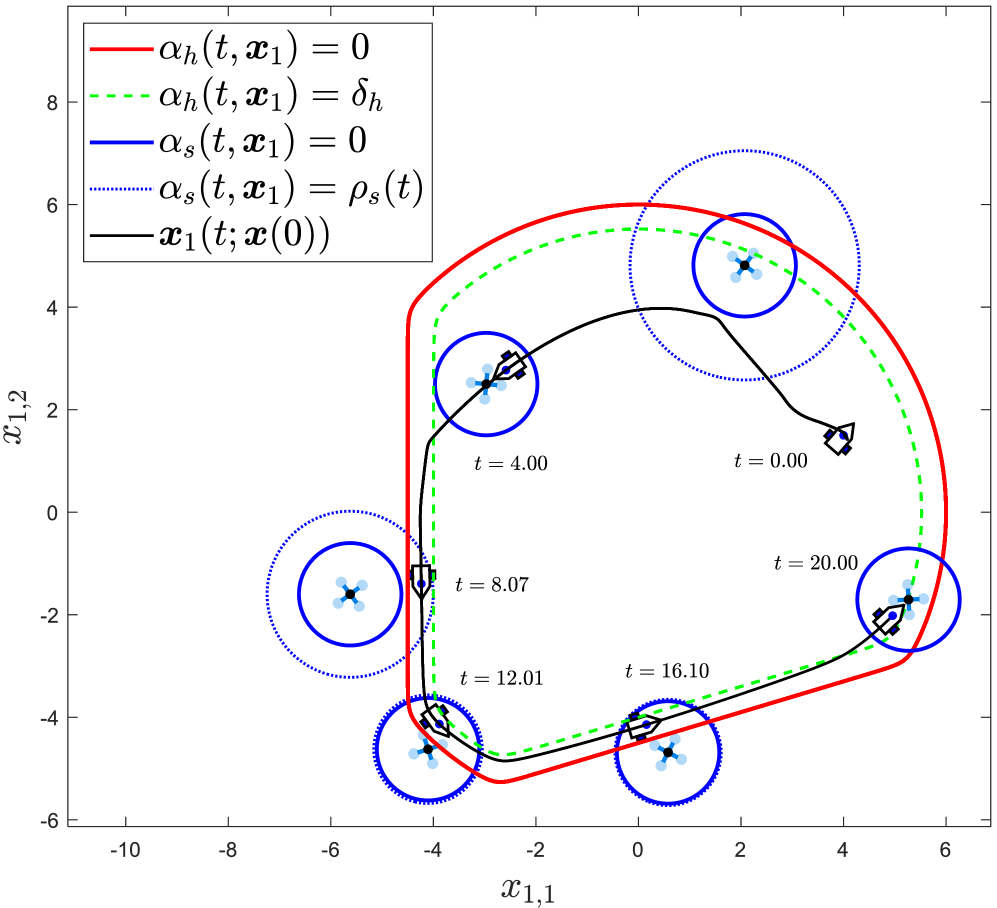
仿真结果表明,所提出的控制律能够有效地处理时变硬约束和软约束,并在约束冲突时优先保证硬约束的满足。该方法在保证安全性的前提下,能够尽可能地优化性能指标,且计算复杂度较低,易于实际应用。具体的性能数据和对比基线在论文中给出。
🎯 应用场景
该研究成果可应用于机器人、无人机、自动驾驶等领域,尤其是在需要同时满足安全约束和性能指标的场景下。例如,在机器人操作中,可以利用该方法保证机器人不与环境发生碰撞(硬约束),同时尽可能快地完成任务(软约束)。在自动驾驶中,可以保证车辆不偏离车道(硬约束),同时保持舒适的行驶速度(软约束)。
📄 摘要(原文)
This paper introduces a novel robust closed-form control law to handle time-varying hard and soft constraints in uncertain high-relative-degree nonlinear MIMO systems. These constraints represent spatiotemporal specifications in mechanical systems' operational space, with hard constraints ensuring safety-critical requirements and soft constraints encoding performance or task objectives. Initially, all constraints are consolidated into two separate scalar time-varying hard and soft constraint functions, whose positive level sets define feasible regions. A closed-form control law is developed to enforce these constraints using appropriately designed reciprocal barriers and nonlinear transformation functions. When conflicts between hard and soft constraints arise, the control law prioritizes hard constraints by virtually relaxing soft constraints via a dynamic relaxation law. Notably, the proposed control law maintains low complexity by avoiding approximation schemes for coping with system uncertainties. Simulation results confirm the effectiveness of the proposed method.