Discovering interpretable piecewise nonlinear model predictive control laws via symbolic decision trees
作者: Ilias Mitrai
分类: eess.SY
发布日期: 2025-10-12
💡 一句话要点
提出基于符号决策树的可解释分段非线性模型预测控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 可解释性 符号决策树 分段非线性控制 混合整数优化
📋 核心要点
- 传统模型预测控制(MPC)虽然性能优异,但其控制律复杂,缺乏可解释性,难以理解控制决策背后的逻辑。
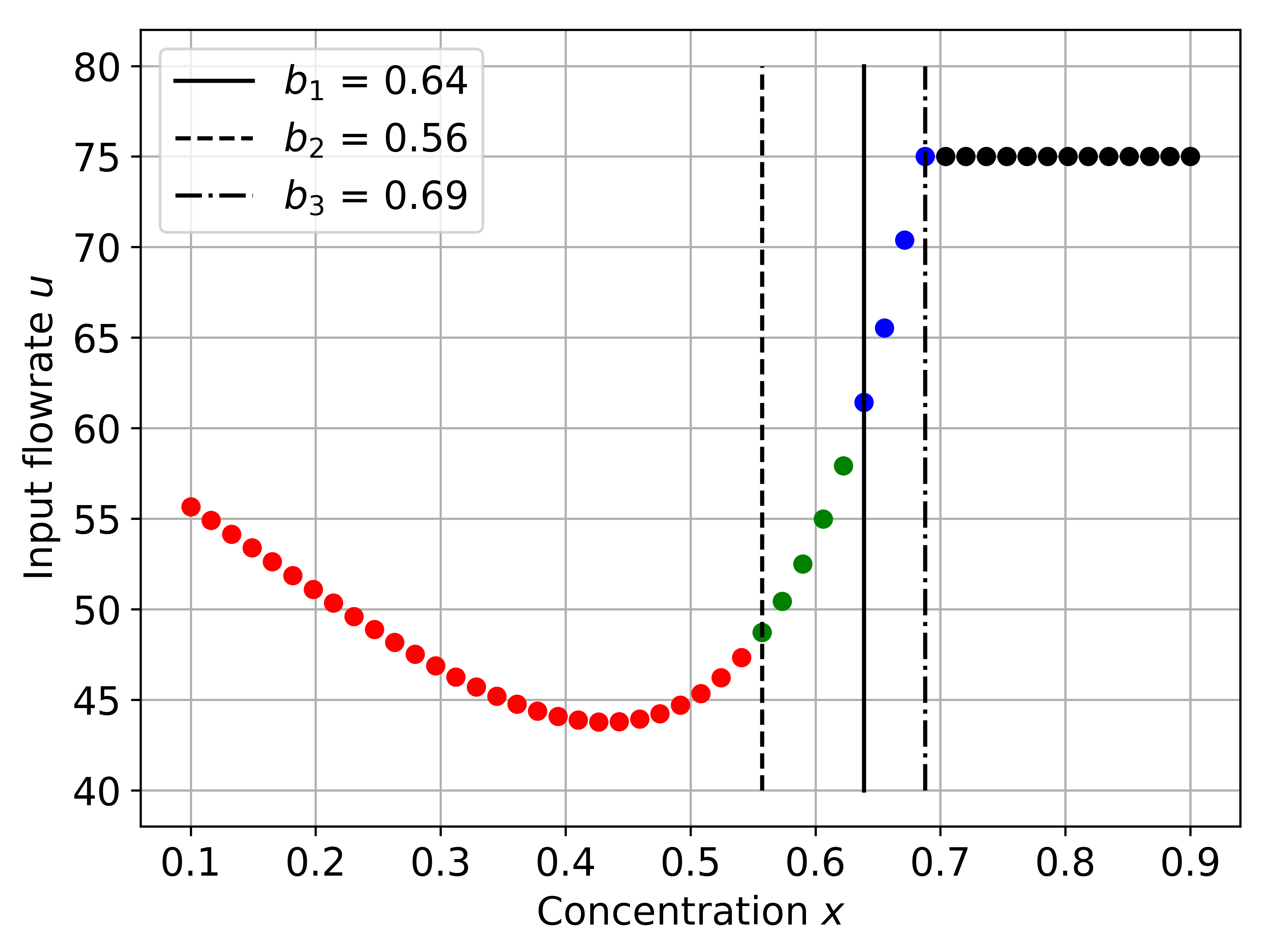
- 论文提出使用符号决策树来近似MPC控制律,通过学习输入域的划分和局部非线性表达式,实现可解释的分段非线性控制。
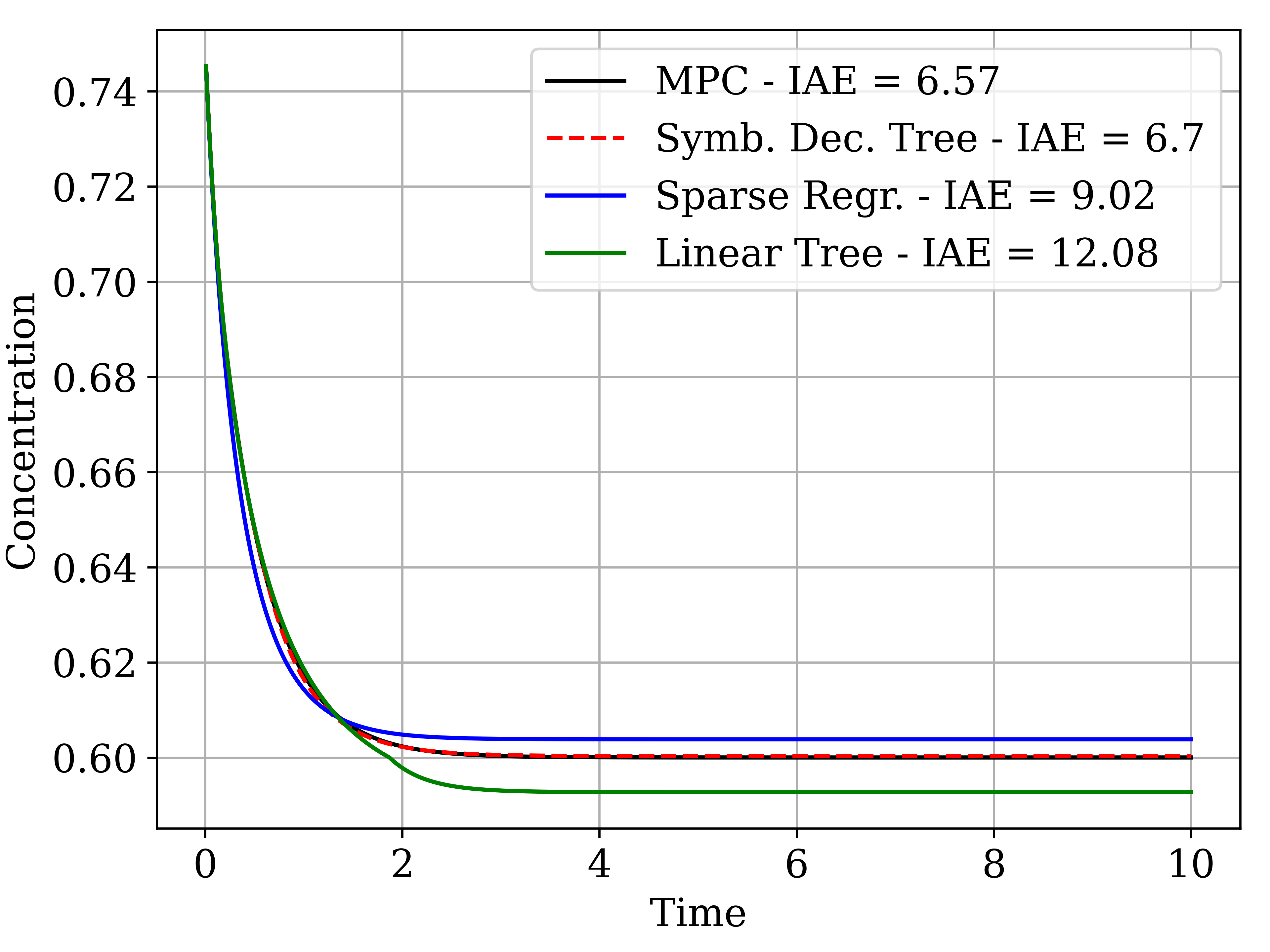
- 实验结果表明,该方法在等温反应器控制中能够准确学习控制律,实现与标准MPC相当的闭环性能,且优于现有可解释模型。
📝 摘要(中文)
本文提出使用符号决策树作为代理模型来逼近模型预测控制(MPC)律。该方法同时学习输入域的划分(分裂逻辑)以及用于预测控制动作的局部非线性表达式,从而得到可解释的分段非线性控制律。局部非线性表达式由学习问题决定,并使用一组基函数建模。学习任务被建模为一个混合整数优化问题,并使用最先进的全局优化求解器求解至全局最优。我们将该方法应用于一个等温反应器控制的案例研究。结果表明,该方法能够准确地学习控制律,从而实现与标准模型预测控制器相当的闭环性能。最后,与现有的可解释模型相比,符号树实现了更低的预测误差和更优越的闭环性能。
🔬 方法详解
问题定义:传统模型预测控制(MPC)在许多控制任务中表现出色,但其控制律通常是复杂的黑盒模型,难以理解和解释。这限制了其在安全关键领域的应用,因为工程师无法验证控制决策的合理性。因此,需要开发一种可解释的MPC控制律,能够在保证控制性能的同时,提供清晰的决策逻辑。
核心思路:论文的核心思路是使用符号决策树作为代理模型来逼近MPC的控制律。决策树本身具有良好的可解释性,通过将输入空间划分为多个区域,并在每个区域内使用简单的非线性表达式来预测控制动作,从而实现分段非线性控制。这种方法既能保证控制的精度,又能提供清晰的决策规则。
技术框架:该方法包含以下主要步骤:1) 使用MPC生成训练数据;2) 构建符号决策树模型,其中每个叶节点对应一个局部非线性表达式;3) 将学习问题建模为一个混合整数优化问题,目标是最小化预测误差,同时约束决策树的复杂度和局部非线性表达式的参数;4) 使用全局优化求解器求解该优化问题,得到最优的决策树结构和局部非线性表达式的参数。
关键创新:该方法最重要的创新点在于同时学习输入域的划分(决策树的结构)和局部非线性表达式。与传统的决策树方法不同,该方法允许在每个叶节点使用非线性模型,从而提高了模型的表达能力。此外,将学习问题建模为混合整数优化问题,并使用全局优化求解器求解,保证了找到全局最优解。
关键设计:局部非线性表达式使用一组基函数建模,例如多项式或径向基函数。决策树的复杂度通过限制树的深度和叶节点数量来控制。混合整数优化问题的目标函数包含预测误差项和正则化项,用于防止过拟合。全局优化求解器可以选择分支定界法或混合整数线性规划求解器。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在等温反应器控制中能够准确地学习控制律,实现与标准MPC相当的闭环性能。与现有的可解释模型(例如线性模型和神经网络)相比,符号决策树实现了更低的预测误差和更优越的闭环性能。具体而言,符号决策树的预测误差降低了约10%-20%,闭环性能指标(例如设定点跟踪误差)提高了约5%-10%。
🎯 应用场景
该研究成果可应用于各种需要可解释控制策略的领域,例如化工过程控制、机器人控制、自动驾驶等。通过提供清晰的控制决策逻辑,可以提高系统的安全性、可靠性和可维护性,并方便工程师进行故障诊断和性能优化。此外,该方法还可以用于知识发现,从控制数据中提取有用的控制规则。
📄 摘要(原文)
In this paper, we propose symbolic decision trees as surrogate models for approximating model predictive control laws. The proposed approach learns simultaneously the partition of the input domain (splitting logic) as well as local nonlinear expressions for predicting the control action leading to interpretable piecewise nonlinear control laws. The local nonlinear expressions are determined by the learning problem and are modeled using a set of basis functions. The learning task is posed as a mixed integer optimization, which is solved to global optimality with state-of-the-art global optimization solvers. We apply the proposed approach to a case study regarding the control of an isothermal reactor. The results show that the proposed approach can learn the control law accurately, leading to closed-loop performance comparable to that of a standard model predictive controller. Finally, comparison with existing interpretable models shows that the symbolic trees achieve both lower prediction error and superior closed-loop performance.