A Predictive and Sampled-Data Barrier Method for Safe and Efficient Quadrotor Control
作者: Ming Gao, Zhanglin Shangguan, Shuo Liu, Liang Wu, Bo Yang, Wei Xiao
分类: eess.SY
发布日期: 2025-10-06
备注: 6 pages, 3 figures
💡 一句话要点
提出基于预测和采样数据Barrier方法的四旋翼安全高效控制框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼控制 模型预测控制 控制Barrier函数 安全控制 采样数据系统
📋 核心要点
- 现有四旋翼控制方法在保证安全性的同时难以兼顾效率,尤其是在高阶安全约束下,设计安全控制器面临挑战。
- 论文提出一种级联控制框架,结合模型预测控制(MPC)和高阶控制Barrier函数(HOCBF),并扩展到采样数据场景,保证采样间隔内的安全性。
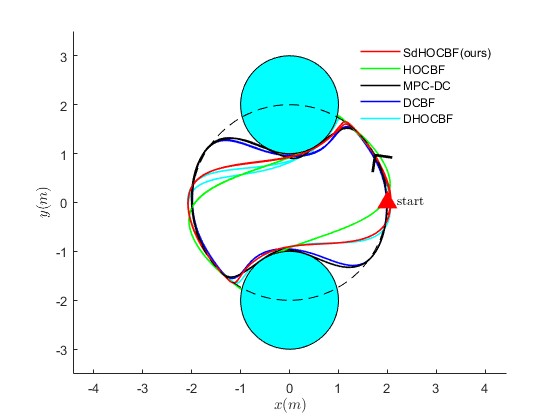
- 通过仿真验证,所提出的方法在保证安全性的前提下,能够实现高效的轨迹跟踪控制,优于现有方法。
📝 摘要(中文)
本文提出了一种用于四旋翼轨迹跟踪的级联控制框架,并具有形式化的安全保证。首先,我们设计了一个控制器,该控制器由一个外环位置模型预测控制(MPC)和一个内环非线性姿态控制组成,从而能够解耦位置安全和偏航方向。其次,由于四旋翼安全约束通常涉及高相对阶数,因此我们采用高阶控制Barrier函数(HOCBF)来保证安全。为了在具有形式保证的MPC公式中使用HOCBF,我们通过引入补偿项将HOCBF扩展到采样数据HOCBF(SdHOCBF),从而确保在整个采样间隔内的安全。我们表明,将SdHOCBF作为控制仿射约束嵌入到MPC公式中,既能保证安全性和最优性,又能保持凸性以实现实时实现。最后,进行了全面的仿真,以证明与现有方法相比,该方法具有安全保证和高效率。
🔬 方法详解
问题定义:四旋翼飞行器在复杂环境中安全高效地进行轨迹跟踪是一个关键问题。现有的控制方法,尤其是在存在高阶安全约束时,往往难以同时保证安全性和控制效率。传统的控制Barrier函数(CBF)方法在高阶系统中的应用面临挑战,而直接应用MPC可能难以满足严格的安全约束。
核心思路:论文的核心思路是将模型预测控制(MPC)与高阶控制Barrier函数(HOCBF)相结合,利用MPC的优化能力实现高效的轨迹跟踪,同时利用HOCBF保证安全性。为了解决HOCBF在离散采样系统中的应用问题,论文提出了采样数据HOCBF(SdHOCBF),通过引入补偿项来保证在整个采样间隔内的安全性。
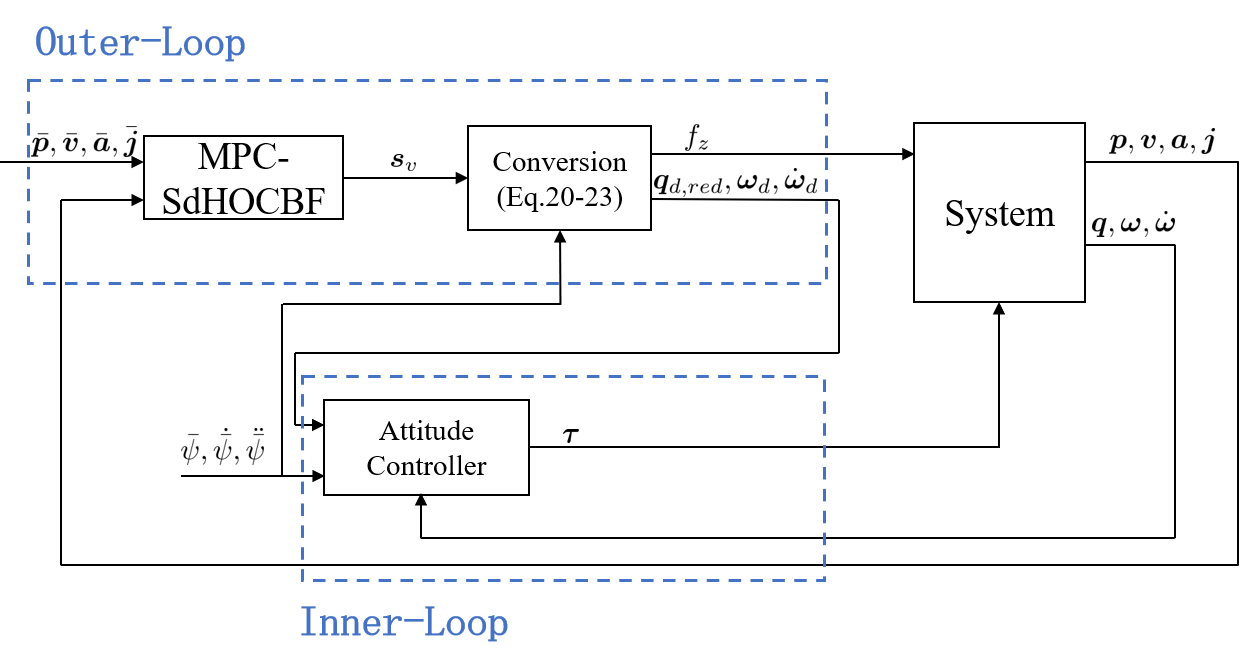
技术框架:该控制框架采用级联结构,包含以下两个主要模块: 1. 外环位置MPC:负责生成期望的位置轨迹,同时考虑SdHOCBF约束,保证位置安全性。 2. 内环非线性姿态控制:负责跟踪外环MPC生成的位置轨迹,实现对四旋翼姿态的精确控制。
关键创新:论文的关键创新在于提出了采样数据高阶控制Barrier函数(SdHOCBF)。传统的HOCBF是针对连续时间系统设计的,无法直接应用于离散采样控制系统。SdHOCBF通过引入补偿项,考虑了采样间隔内的系统动态,从而保证了在整个采样间隔内的安全性。此外,将SdHOCBF作为控制仿射约束嵌入到MPC公式中,保证了MPC的凸性,有利于实时实现。
关键设计: 1. SdHOCBF的补偿项设计:补偿项的设计需要精确估计采样间隔内的系统动态,以保证安全约束的有效性。具体的设计方法未知,论文中可能包含相关公式推导。 2. MPC的约束设计:MPC的约束包括状态约束、控制输入约束和SdHOCBF约束。SdHOCBF约束保证了安全性,而其他约束则保证了系统的稳定性和可行性。 3. MPC的优化目标设计:MPC的优化目标通常包括跟踪误差和控制输入惩罚项,用于实现高效的轨迹跟踪。
🖼️ 关键图片

📊 实验亮点
仿真结果表明,所提出的方法能够有效地保证四旋翼飞行器的安全性,即使在存在高阶安全约束的情况下。与传统的控制方法相比,该方法在保证安全性的前提下,能够实现更高的控制效率和更精确的轨迹跟踪。具体的性能提升数据未知,需要在论文中查找。
🎯 应用场景
该研究成果可应用于无人机物流、无人机巡检、无人机搜救等领域。通过保证四旋翼飞行器的安全性和控制效率,可以提高这些应用的可靠性和效率,降低事故风险。未来,该方法有望推广到其他类型的机器人控制中,例如自动驾驶汽车和工业机器人。
📄 摘要(原文)
This paper proposes a cascaded control framework for quadrotor trajectory tracking with formal safety guarantees. First, we design a controller consisting of an outer-loop position model predictive control (MPC) and an inner-loop nonlinear attitude control, enabling decoupling of position safety and yaw orientation. Second, since quadrotor safety constraints often involve high relative degree, we adopt high order control barrier functions (HOCBFs) to guarantee safety. To employ HOCBFs in the MPC formulation that has formal guarantees, we extend HOCBFs to sampled-data HOCBF (SdHOCBFs) by introducing compensation terms, ensuring safety over the entire sampling interval. We show that embedding SdHOCBFs as control-affine constraints into the MPC formulation guarantees both safety and optimality while preserving convexity for real-time implementations. Finally, comprehensive simulations are conducted to demonstrate the safety guarantee and high efficiency of the proposed method compared to existing methods.