Efficient Probabilistic Planning with Maximum-Coverage Distributionally Robust Backward Reachable Trees
作者: Alex Rose, Naman Aggarwal, Christopher Jewison, Jonathan P. How
分类: eess.SY, cs.RO
发布日期: 2025-10-06
💡 一句话要点
提出基于最大覆盖分布鲁棒后向可达树的高效概率规划算法,用于线性高斯系统运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 概率规划 鲁棒控制 高斯分布 后向可达树
📋 核心要点
- 现有方法在处理具有不确定性的线性高斯系统运动规划时,覆盖范围和鲁棒性存在不足。
- 论文核心在于构建分布鲁棒的后向可达树,通过最大化球形模糊集覆盖范围,提升规划的安全性。
- 实验证明,新算法在多种条件下优于现有最大覆盖算法,并在特定情况下实现了最大覆盖。
📝 摘要(中文)
本文提出了一种新的多查询运动规划算法,用于线性高斯系统,目标是以高概率到达一个欧几里得球。我们为高斯分布的球形模糊集开发了一种新的公式,并利用它来开发一种分布鲁棒的信念路线图构建算法。该算法合成了鲁棒控制器,该控制器被证明对于高斯分布的最大尺寸球形模糊集是安全的。我们的算法比高斯分布规划的最大覆盖算法[1]实现了更好的覆盖,并且我们确定了我们的算法实现严格更好覆盖的温和条件。对于没有过程噪声或状态约束的特殊情况,我们正式证明我们的算法实现了最大覆盖。此外,我们还提出了一种用于线性高斯系统的第二种多查询运动规划算法,目标是以高概率到达由椭球和欧几里得球的闵可夫斯基和参数化的区域。该算法规划了高斯分布的最大尺寸球形模糊集的椭球集,并且可证明地实现了等于或优于高斯分布的椭球模糊集规划的最佳已知算法[2]的覆盖。我们通过广泛的模拟实验证明了这两种方法在各种条件下的有效性。
🔬 方法详解
问题定义:论文旨在解决线性高斯系统在存在不确定性时,如何高效地进行运动规划,以高概率到达目标区域的问题。现有方法在处理高斯噪声时,往往难以保证规划的鲁棒性和覆盖范围,尤其是在存在过程噪声和状态约束的情况下。
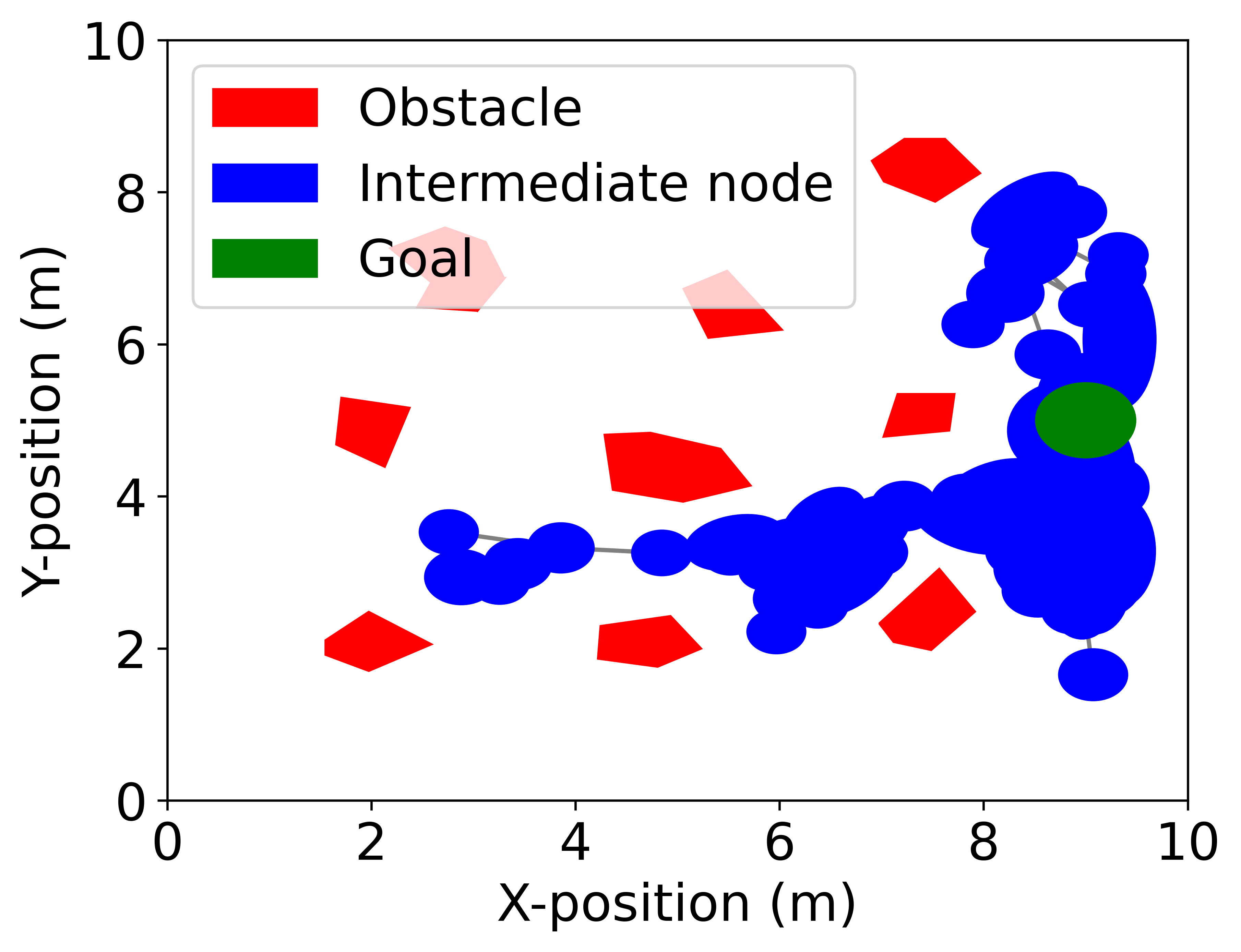
核心思路:论文的核心思路是构建分布鲁棒的后向可达树,通过最大化高斯分布的球形模糊集的覆盖范围,来提高规划的鲁棒性和效率。这种方法能够保证控制器在面对不确定性时仍然能够安全地引导系统到达目标区域。
技术框架:该算法主要包含以下几个阶段:1) 定义高斯分布的球形模糊集;2) 构建分布鲁棒的信念路线图;3) 合成鲁棒控制器,保证在最大尺寸的球形模糊集下系统的安全性;4) 利用后向可达树进行多查询运动规划。对于特定情况(无过程噪声或状态约束),算法能够实现最大覆盖。
关键创新:论文的关键创新在于提出了针对高斯分布的球形模糊集的新公式,并将其应用于分布鲁棒的信念路线图构建中。与现有方法相比,该方法能够更好地处理高斯噪声带来的不确定性,从而实现更高的覆盖范围和鲁棒性。此外,针对椭球和欧几里得球的闵可夫斯基和参数化的目标区域,提出了相应的规划算法,并证明其性能优于现有算法。
关键设计:论文的关键设计包括:1) 球形模糊集的定义方式,需要保证能够有效地捕捉高斯分布的不确定性;2) 鲁棒控制器的设计,需要保证在模糊集内的所有可能分布下,系统都能够安全地到达目标区域;3) 后向可达树的构建策略,需要保证能够高效地探索状态空间,并找到最优的运动轨迹。
🖼️ 关键图片

📊 实验亮点
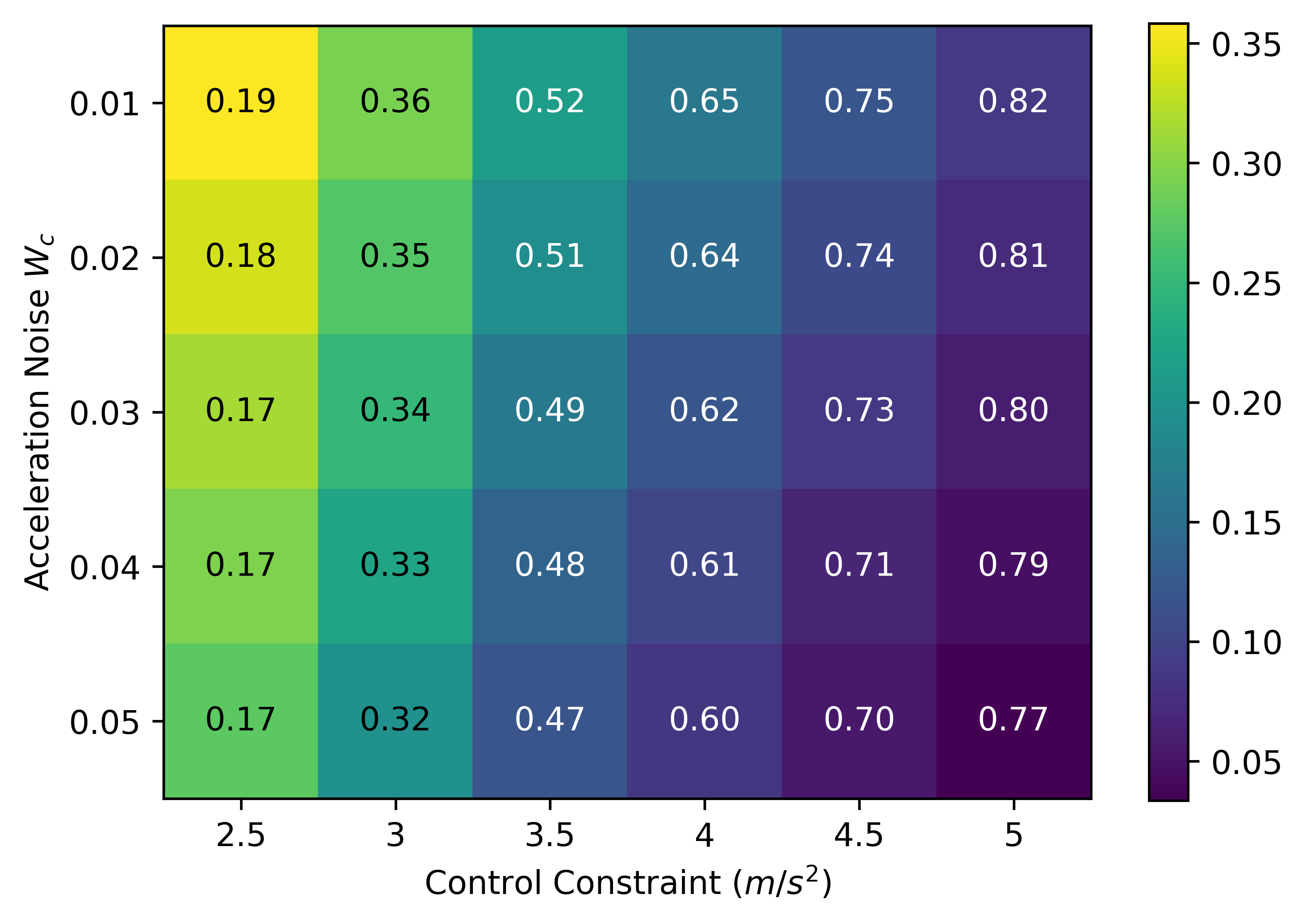
实验结果表明,该算法在多种条件下优于现有的最大覆盖算法。在没有过程噪声或状态约束的特殊情况下,该算法能够实现最大覆盖。此外,针对椭球和欧几里得球的闵可夫斯基和参数化的目标区域,该算法也实现了优于现有算法的覆盖范围。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、航空航天等领域,尤其是在环境感知存在不确定性的情况下。例如,无人机在复杂环境中进行自主飞行时,可以利用该算法规划出安全可靠的飞行轨迹。该研究有助于提高系统的自主性和安全性,降低人为干预的需求。
📄 摘要(原文)
This paper presents a new multi-query motion planning algorithm for linear Gaussian systems with the goal of reaching a Euclidean ball with high probability. We develop a new formulation for ball-shaped ambiguity sets of Gaussian distributions and leverage it to develop a distributionally robust belief roadmap construction algorithm. This algorithm synthe- sizes robust controllers which are certified to be safe for maximal size ball-shaped ambiguity sets of Gaussian distributions. Our algorithm achieves better coverage than the maximal coverage algorithm for planning over Gaussian distributions [1], and we identify mild conditions under which our algorithm achieves strictly better coverage. For the special case of no process noise or state constraints, we formally prove that our algorithm achieves maximal coverage. In addition, we present a second multi-query motion planning algorithm for linear Gaussian systems with the goal of reaching a region parameterized by the Minkowski sum of an ellipsoid and a Euclidean ball with high probability. This algorithm plans over ellipsoidal sets of maximal size ball-shaped ambiguity sets of Gaussian distributions, and provably achieves equal or better coverage than the best-known algorithm for planning over ellipsoidal ambiguity sets of Gaussian distributions [2]. We demonstrate the efficacy of both methods in a wide range of conditions via extensive simulation experiments.