MPC strategies for density profile control with pellet fueling in nuclear fusion tokamaks under uncertainty
作者: Christopher A. Orrico, Hari Prasad Varadarajan, Matthijs van Berkel, Lennard Ceelen, Thomas O. S. J. Bosman, W. P. M. H. Heemels, Dinesh Krishnamoorthy
分类: eess.SY
发布日期: 2025-10-06
备注: IEEE CDC 2025
💡 一句话要点
针对核聚变托卡马克密度控制,提出不确定性下基于多级MPC的燃料丸控制策略
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 核聚变 托卡马克 密度剖面控制 模型预测控制 不确定性 燃料丸注入 多级MPC
📋 核心要点
- ITER托卡马克密度剖面控制面临参数不确定性、输入延迟和离散执行器等挑战,传统方法难以保证控制性能和安全性。
- 提出多级MPC(msMPC)框架,通过场景树处理不确定性,并结合动态模式分解、主成分分析和PTH-MPC算法降低计算复杂度。
- 仿真结果表明,msMPC策略在不确定性下优于标称MI-MPC,为ITER实时燃料丸注入提供了一种可行的预测控制方案。
📝 摘要(中文)
本文针对ITER核聚变托卡马克中基于燃料丸注入的密度剖面控制问题,该问题涉及具有安全约束、输入延迟、离散执行器和参数不确定性的多速率非线性系统。为了解决这一挑战,我们提出了一种多级模型预测控制(msMPC)方法来处理混合整数输入存在下的不确定性。虽然msMPC的场景树考虑了不确定性,但也增加了本已计算密集型的混合整数MPC(MI-MPC)问题的复杂性。为了实现具有离散燃料丸和不确定性处理的实时密度剖面控制器,我们通过以下方式系统地降低了问题的复杂性:(1)通过带控制的动态模式分解来减少已识别的预测模型大小,(2)应用主成分分析来减少msMPC中捕获参数不确定性所需的场景数量,以及(3)利用MPC的惩罚项同伦(PTH-MPC)算法来减少混合整数输入带来的计算负担。我们在工厂仿真中将msMPC策略的性能和安全性与标称MI-MPC进行了比较,展示了第一个具有不确定性处理的预测密度控制策略,该策略适用于ITER中的实时燃料丸注入。
🔬 方法详解
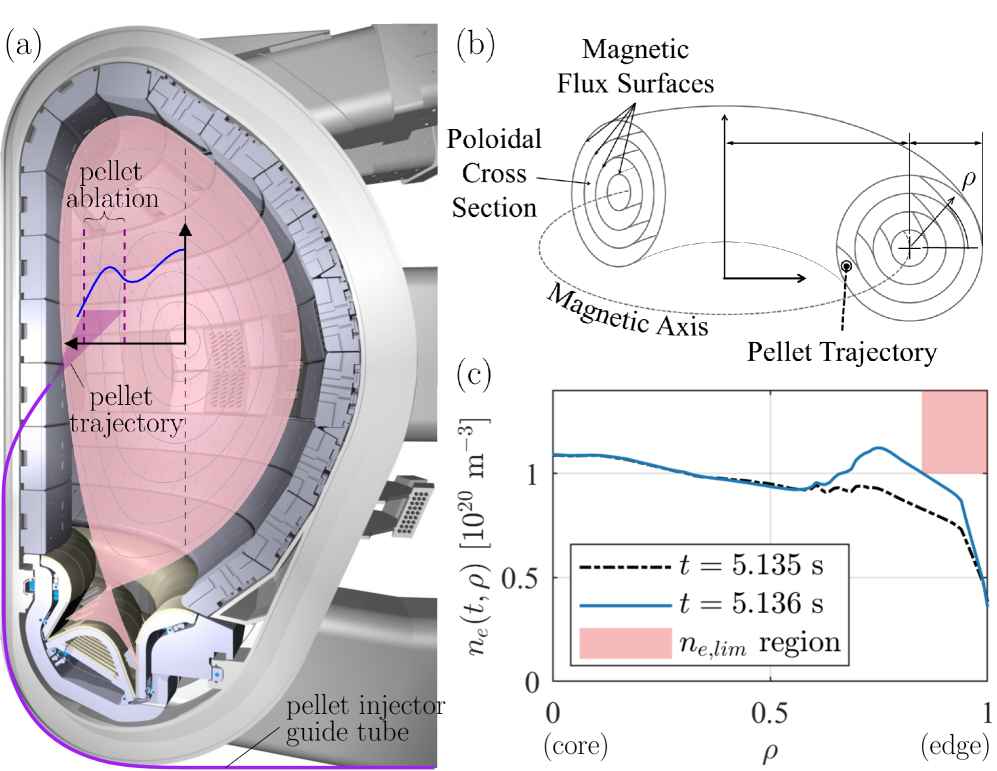
问题定义:论文旨在解决核聚变托卡马克中,利用燃料丸注入进行密度剖面控制时,面临的参数不确定性、输入延迟、离散执行器以及安全约束等问题。现有方法,如传统的MI-MPC,在处理这些复杂因素时,计算量大,难以满足实时性要求,且对不确定性的鲁棒性较差。
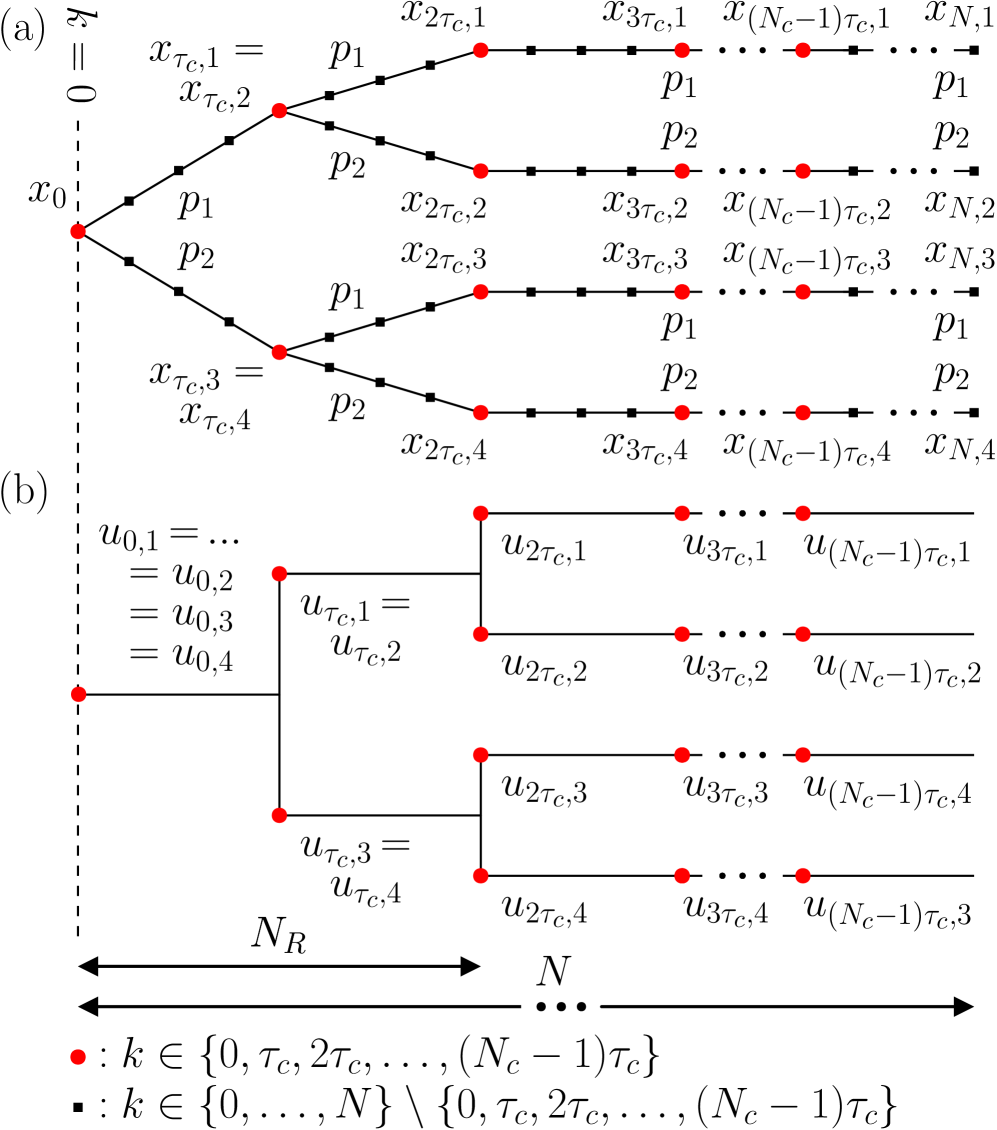
核心思路:论文的核心思路是利用多级MPC(msMPC)框架,通过构建场景树来显式地处理参数不确定性。同时,为了降低计算复杂度,采用了模型降阶、场景缩减以及高效的混合整数优化算法等技术。这样既能保证控制性能,又能满足实时性要求。
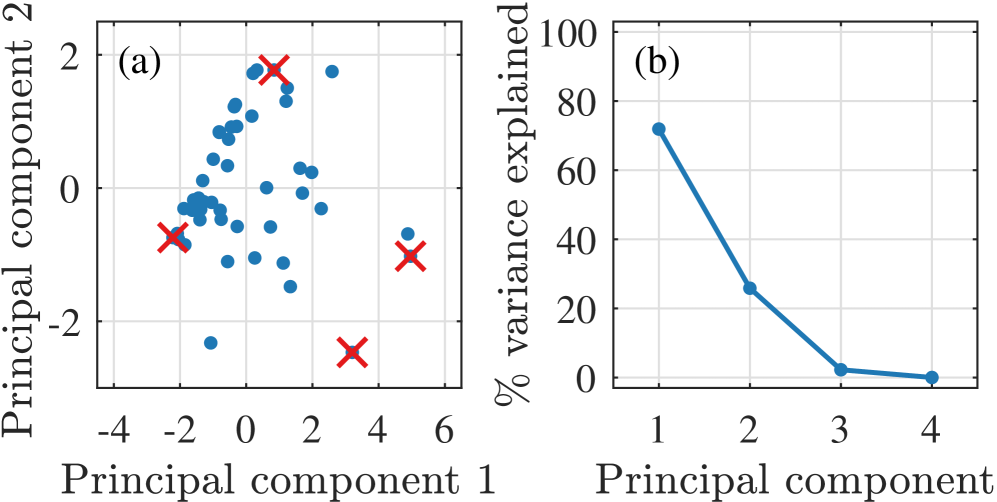
技术框架:整体框架包括以下几个主要模块:1) 系统辨识与模型降阶:利用动态模式分解(DMDc)对托卡马克系统进行建模,并进行模型降阶,降低计算复杂度。2) 不确定性建模与场景生成:通过参数分析,对系统中的不确定性进行建模,并利用主成分分析(PCA)减少场景数量。3) 多级MPC控制器设计:设计基于场景树的msMPC控制器,显式地考虑不确定性。4) 混合整数优化求解:利用惩罚项同伦(PTH-MPC)算法,高效地求解混合整数优化问题。
关键创新:论文的关键创新在于将多级MPC与模型降阶、场景缩减以及高效的混合整数优化算法相结合,提出了一种适用于核聚变托卡马克密度剖面控制的实时预测控制策略。这是首个考虑不确定性并适用于实时燃料丸注入的密度控制策略。与传统方法相比,该方法在处理不确定性和计算效率方面具有显著优势。
关键设计:在模型降阶方面,DMDc算法用于提取系统的主要动态模式。在场景缩减方面,PCA用于减少场景数量,同时保留不确定性的主要信息。在混合整数优化方面,PTH-MPC算法通过逐步调整惩罚项,降低了求解难度。具体参数设置和损失函数的设计需要根据具体的托卡马克系统和控制目标进行调整。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,所提出的msMPC策略在存在参数不确定性的情况下,能够有效地控制密度剖面,并满足安全约束。与标称MI-MPC相比,msMPC在鲁棒性和控制性能方面均有显著提升,验证了该方法在实际应用中的可行性。
🎯 应用场景
该研究成果可应用于ITER等核聚变实验堆的密度剖面控制,提高等离子体约束性能,延长放电时间,为实现稳定、高效的核聚变反应提供保障。此外,该方法也可推广到其他具有不确定性和混合整数约束的复杂工业过程控制中,具有重要的应用价值和推广前景。
📄 摘要(原文)
Control of the density profile based on pellet fueling for the ITER nuclear fusion tokamak involves a multi-rate nonlinear system with safety-critical constraints, input delays, and discrete actuators with parametric uncertainty. To address this challenging problem, we propose a multi-stage MPC (msMPC) approach to handle uncertainty in the presence of mixed-integer inputs. While the scenario tree of msMPC accounts for uncertainty, it also adds complexity to an already computationally intensive mixed-integer MPC (MI-MPC) problem. To achieve real-time density profile controller with discrete pellets and uncertainty handling, we systematically reduce the problem complexity by (1) reducing the identified prediction model size through dynamic mode decomposition with control, (2) applying principal component analysis to reduce the number of scenarios needed to capture the parametric uncertainty in msMPC, and (3) utilizing the penalty term homotopy for MPC (PTH-MPC) algorithm to reduce the computational burden caused by the presence of mixed-integer inputs. We compare the performance and safety of the msMPC strategy against a nominal MI-MPC in plant simulations, demonstrating the first predictive density control strategy with uncertainty handling, viable for real-time pellet fueling in ITER.