Convex Pollution Control of Wastewater Treatment Systems
作者: Joshua Taylor
分类: math.OC, eess.SY
发布日期: 2025-10-04
💡 一句话要点
提出基于凸优化的污水处理系统模型预测控制方法,降低污染物排放。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 污水处理 模型预测控制 凸优化 二阶锥规划 污染物控制
📋 核心要点
- 现有污水处理控制方法难以在最小化洪水和污染物排放之间取得平衡,且计算复杂度高。
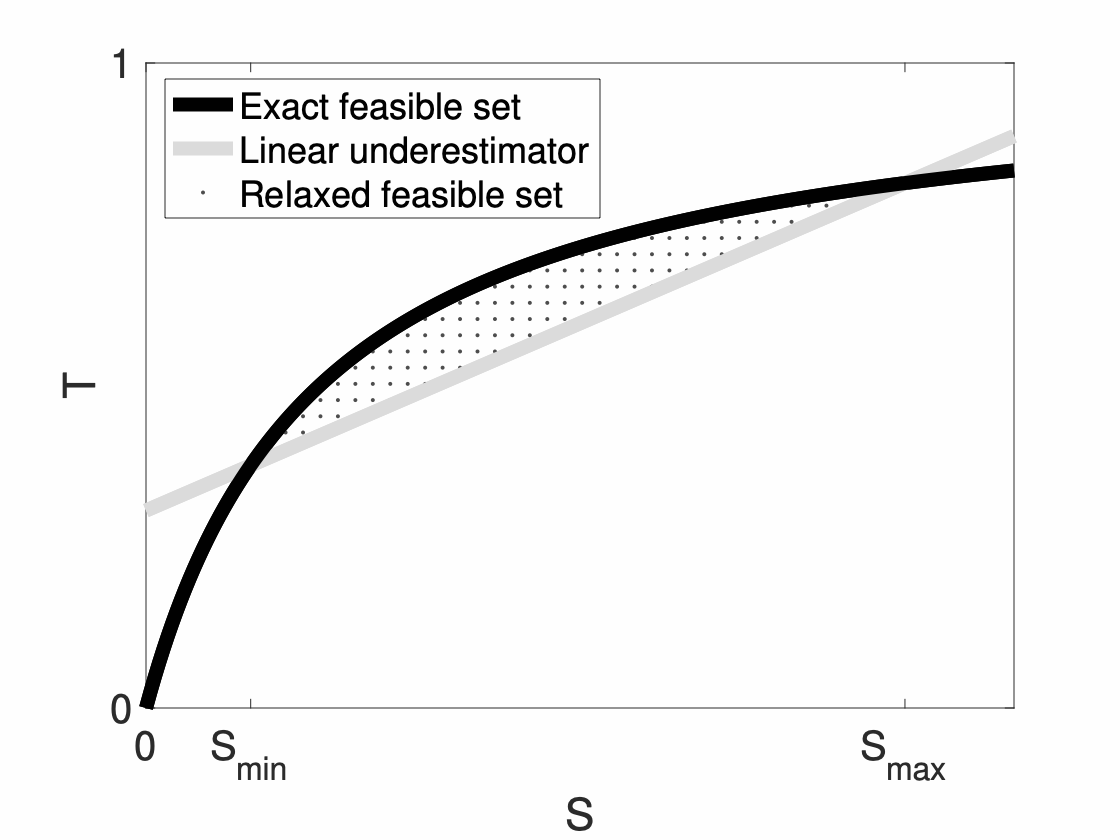
- 采用凸松弛和线性化方法简化模型,将复杂的非线性优化问题转化为可高效求解的二阶锥规划问题。
- 仿真结果表明,该控制器在处理相同流量的情况下,比传统控制器减少了约15%的污染物排放。
📝 摘要(中文)
本文设计了一种用于管理污水管网执行器的模型预测控制器。该控制器旨在最小化雨季的洪水和合流制污水溢流,以及其他时间的污染物排放。为了使问题易于处理,我们对微生物生长动力学使用了凸松弛,并对质量流量双线性项进行了基于物理的线性化。通过这些近似,每个控制周期中的轨迹优化都转化为一个二阶锥规划问题。在仿真中,该控制器在处理几乎相同流量的情况下,比传统控制器减少约15%的污染物排放量。这主要是通过更好地平衡处理厂之间的流量以及随时间的流量来实现的。
🔬 方法详解
问题定义:论文旨在解决污水处理系统中,如何在雨季和非雨季有效控制污水流量,最小化洪水、合流制污水溢流以及污染物排放的问题。现有方法通常难以在多个目标之间进行有效权衡,并且由于模型的高度非线性,计算复杂度很高,难以实现实时控制。
核心思路:论文的核心思路是通过对微生物生长动力学进行凸松弛,并对质量流量双线性项进行线性化,将原问题转化为一个凸优化问题。这种转化使得可以使用高效的二阶锥规划求解器进行求解,从而实现实时控制。通过模型预测控制(MPC)框架,控制器可以预测未来一段时间内的系统状态,并优化控制策略,从而更好地平衡各个目标。
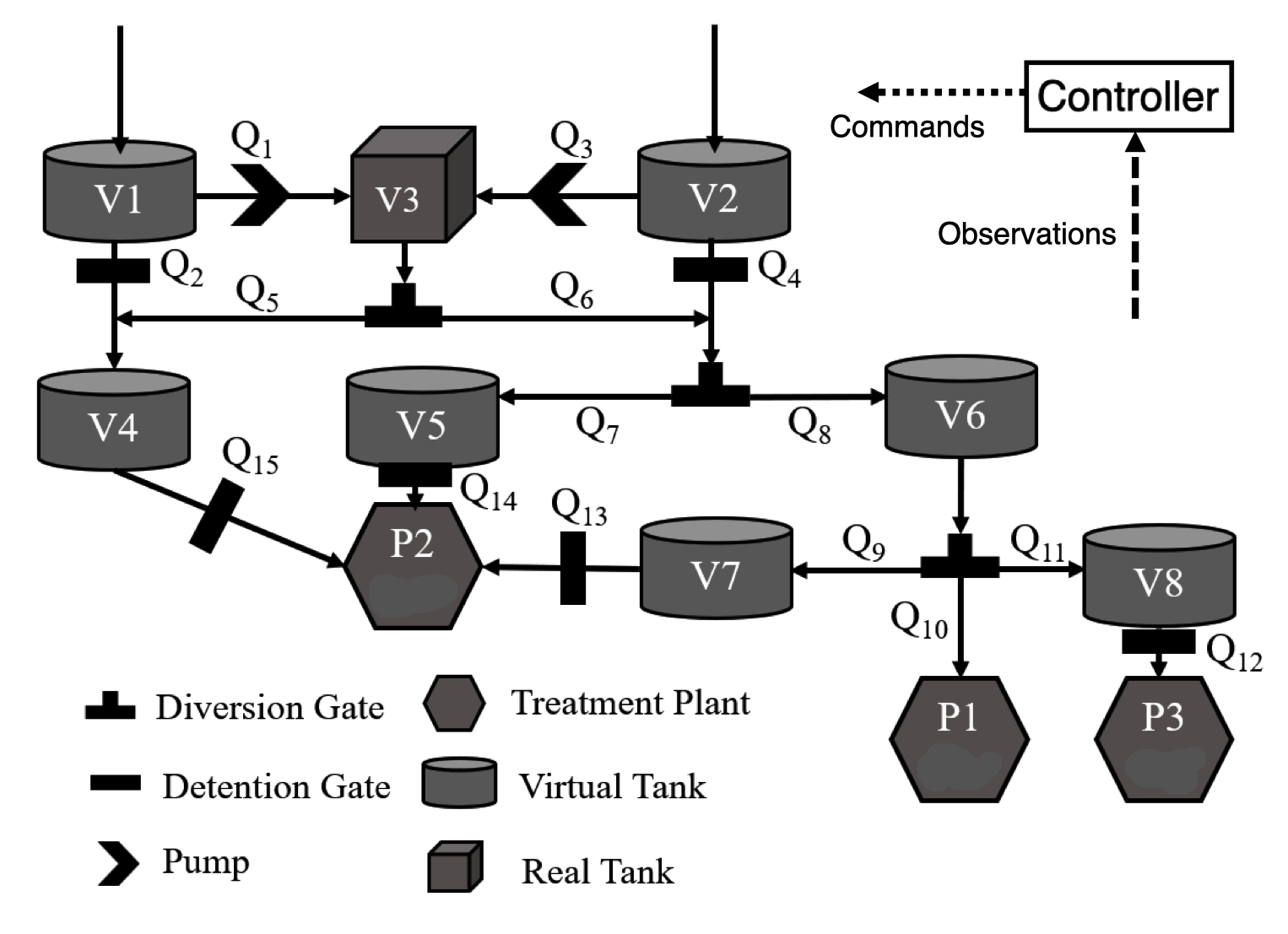
技术框架:该方法基于模型预测控制(MPC)框架。首先,建立污水处理系统的数学模型,包括水力模型和生化模型。然后,对模型中的非线性项进行凸松弛和线性化处理。接下来,在每个控制周期内,使用二阶锥规划求解器求解优化问题,得到最优的控制策略。最后,将控制策略应用于实际的污水处理系统。
关键创新:该论文的关键创新在于使用凸松弛和线性化技术,将非凸、非线性的污水处理控制问题转化为凸优化问题。这种转化使得可以使用高效的二阶锥规划求解器进行求解,从而实现实时控制。此外,该方法还考虑了多个控制目标,包括最小化洪水、合流制污水溢流以及污染物排放。
关键设计:论文中,微生物生长动力学的凸松弛和质量流量双线性项的线性化是关键设计。具体的凸松弛方法未知,但其目的是将非凸函数转化为凸函数,以便进行优化。质量流量双线性项的线性化则是基于物理的近似,可能涉及到在特定工作点附近进行泰勒展开。此外,目标函数的设计也至关重要,需要合理权衡各个控制目标的重要性。
🖼️ 关键图片
📊 实验亮点
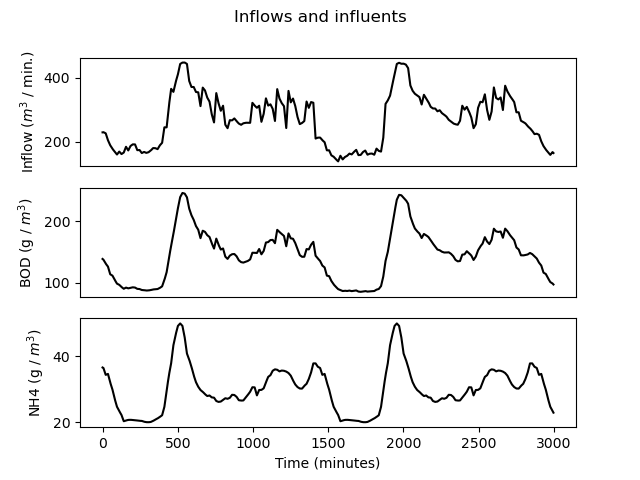
仿真结果表明,所提出的基于凸优化的模型预测控制器在处理几乎相同流量的情况下,比传统控制器减少了约15%的污染物排放量。这表明该方法能够更有效地平衡处理厂之间的流量以及随时间的流量,从而提高污水处理效率,减少污染物排放。
🎯 应用场景
该研究成果可应用于城市污水处理系统的优化控制,提高污水处理效率,减少污染物排放,降低洪水和合流制污水溢流的风险。通过实时优化控制策略,可以更好地应对降雨等不确定因素的影响,提高污水处理系统的稳定性和可靠性。该方法还可推广到其他水资源管理领域,如水库调度、灌溉系统优化等。
📄 摘要(原文)
We design a model-predictive controller for managing the actuators in sewer networks. It minimizes flooding and combined-sewer overflow during rain and pollution at other times. To make the problem tractable, we use a convex relaxation of the microbial growth kinetics and a physically motivated linearization of the mass flow bilinearities. With these approximations, the trajectory optimization in each control period is a second-order cone program. In simulation, the controller releases roughly 15% less pollutant mass than a conventional controller while treating nearly the same volume of flow. It does so by better balancing the flow over the treatment plants and over time.