Probabilistic Control Barrier Functions: Safety in Probability for Discrete-Time Stochastic Systems
作者: Pol Mestres, Blake Werner, Ryan K. Cosner, Aaron D. Ames
分类: eess.SY, math.OC
发布日期: 2025-10-01
💡 一句话要点
提出概率控制障碍函数,保障离散时间随机系统的概率安全性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 概率控制障碍函数 随机系统 安全控制 不确定性量化 机器人控制
📋 核心要点
- 传统控制方法难以应对现实世界中控制系统面临的随机不确定性,可能导致安全保障失效。
- 论文提出概率控制障碍函数(Probabilistic CBF)方法,显式考虑随机不确定性,保证系统在一定概率下的安全性。
- 通过仿真和硬件实验,验证了该方法在四足机器人控制中的有效性和适用性。
📝 摘要(中文)
现实世界中的控制系统面临着无数不可预测的不确定性来源。这些随机扰动可能导致确定性保证失效,并造成灾难性的安全故障。为了克服这个问题,本文提出了一种为离散时间随机系统设计安全控制器的方法,该方法保留了概率安全保证。为此,我们修改了传统的控制障碍函数(CBF)的概念,以明确考虑这些随机不确定性,并将这些新的修改函数称为概率CBF。我们证明了概率CBF可用于设计控制器,以在有限的时间步长内以规定的概率保证安全。接下来,通过利用各种不确定性量化方法,例如集中不等式、情景方法和共形预测,我们提供了各种充分条件,这些条件可以产生具有可调概率保证的计算上易于处理的控制器,适用于各种实际场景。最后,我们在四足机器人的控制仿真和硬件中展示了我们结果的适用性。
🔬 方法详解
问题定义:论文旨在解决离散时间随机系统在不确定性下的安全控制问题。传统的控制障碍函数(CBF)方法是确定性的,无法直接应用于存在随机扰动的系统。现有方法要么忽略不确定性,要么采用保守的确定性近似,导致性能下降或安全保障不足。
核心思路:论文的核心思路是将传统的确定性CBF扩展到概率域,提出概率控制障碍函数(Probabilistic CBF)。通过显式地考虑随机不确定性,并利用概率工具来量化安全风险,从而设计出能够在一定概率下保证系统安全的控制器。这种方法允许在安全性和性能之间进行权衡,避免了过于保守的设计。
技术框架:论文的技术框架主要包括以下几个步骤:1) 定义离散时间随机系统模型;2) 引入概率控制障碍函数(Probabilistic CBF)的概念,并推导出相应的安全条件;3) 利用不确定性量化方法(如集中不等式、情景方法、共形预测)将概率安全条件转化为可计算的约束;4) 设计控制器,使其满足这些约束,从而保证系统的概率安全性。
关键创新:论文最重要的技术创新在于提出了概率控制障碍函数(Probabilistic CBF)的概念,并将其与不确定性量化方法相结合。与传统的确定性CBF相比,概率CBF能够显式地考虑随机不确定性,并提供概率安全保证。此外,论文还提供了多种不确定性量化方法,使得该方法能够适用于各种实际场景。
关键设计:论文的关键设计包括:1) 概率CBF的定义,需要选择合适的障碍函数和概率阈值;2) 不确定性量化方法的选择,不同的方法适用于不同的不确定性分布和系统模型;3) 控制器的设计,需要满足概率安全约束,并尽可能优化性能。论文利用二次规划(QP)来求解满足约束的控制输入。
🖼️ 关键图片

📊 实验亮点
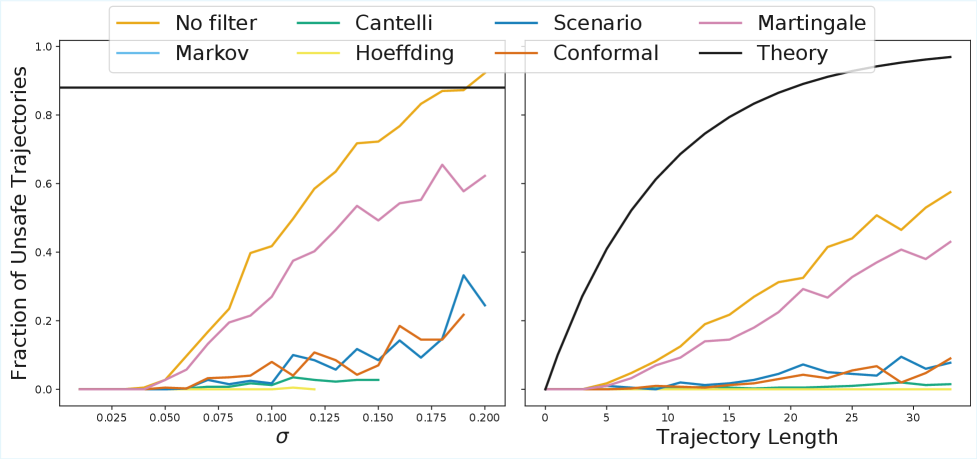
论文通过仿真和硬件实验验证了所提出的概率CBF方法的有效性。在四足机器人控制实验中,该方法能够在存在随机扰动的情况下,以较高的概率保证机器人的安全行走。实验结果表明,该方法能够在安全性和性能之间取得良好的平衡,优于传统的确定性控制方法。
🎯 应用场景
该研究成果可广泛应用于机器人、自动驾驶、航空航天等领域,尤其是在存在不确定性和随机扰动的环境中。例如,可以用于设计在复杂地形中安全行走的机器人,或者在交通拥堵情况下安全行驶的自动驾驶车辆。该方法能够提高系统的安全性和可靠性,降低事故发生的概率。
📄 摘要(原文)
Control systems operating in the real world face countless sources of unpredictable uncertainties. These random disturbances can render deterministic guarantees inapplicable and cause catastrophic safety failures. To overcome this, this paper proposes a method for designing safe controllers for discrete-time stochastic systems that retain probabilistic guarantees of safety. To do this we modify the traditional notion of a control barrier function (CBF) to explicitly account for these stochastic uncertainties and call these new modified functions probabilistic CBFs. We show that probabilistic CBFs can be used to design controllers that guarantee safety over a finite number of time steps with a prescribed probability. Next, by leveraging various uncertainty quantification methods, such as concentration inequalities, the scenario approach, and conformal prediction, we provide a variety of sufficient conditions that result in computationally tractable controllers with tunable probabilistic guarantees across a plethora of practical scenarios. Finally, we showcase the applicability of our results in simulation and hardware for the control of a quadruped robot.