A Robust Neural Control Design for Multi-drone Slung Payload Manipulation with Control Contraction Metrics
作者: Xinyuan Liang, Longhao Qian, Yi Lok Lo, Hugh H. T. Liu
分类: eess.SY, cs.RO
发布日期: 2025-10-01
备注: Submit to the 2026 American Control Conference (ACC)
💡 一句话要点
提出基于控制收缩度量和神经控制器的多无人机吊索负载操纵鲁棒控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多无人机协同 吊索负载 鲁棒控制 控制收缩度量 神经控制 扰动估计 轨迹跟踪
📋 核心要点
- 现有方法在多无人机吊索负载操纵中难以兼顾鲁棒性和控制约束。
- 利用控制收缩度量设计神经控制器,并结合不确定性与扰动估计器,实现鲁棒控制。
- 仿真结果验证了该控制设计在复杂轨迹跟踪和抗外部扰动方面的有效性。
📝 摘要(中文)
本文提出了一种鲁棒的神经控制设计,用于三无人机吊索负载运输系统,以在外部扰动下跟踪参考路径。利用控制收缩度量(CCM)生成神经指数收敛基线控制器,同时满足控制输入饱和约束。此外,我们还结合了不确定性和扰动估计器(UDE)技术,以动态补偿持续扰动。所提出的框架产生模块化设计,允许控制器和估计器执行各自的任务,并在扰动满足某些假设时实现零轨迹跟踪误差。本文还介绍了包含CCM控制器和UDE补偿器的完整系统的稳定性和鲁棒性。仿真结果表明,所提出的控制设计能够在外部扰动下跟踪复杂的轨迹。
🔬 方法详解
问题定义:本文旨在解决多无人机协同吊索负载运输系统在存在外部扰动的情况下,如何实现精确的轨迹跟踪控制问题。现有方法通常难以同时保证系统的鲁棒性(抗扰动能力)和满足控制输入的饱和约束,导致控制性能下降甚至系统不稳定。
核心思路:本文的核心思路是结合控制收缩度量(CCM)和不确定性与扰动估计器(UDE),设计一个模块化的鲁棒神经控制框架。CCM用于设计一个指数收敛的基线控制器,保证系统在理想情况下的稳定性,同时考虑控制输入的饱和约束。UDE用于动态估计和补偿外部扰动,提高系统的鲁棒性。
技术框架:该控制框架主要包含两个模块:CCM神经控制器和UDE扰动补偿器。首先,利用CCM设计一个基线神经控制器,该控制器能够保证系统在无扰动情况下的指数稳定性,并满足控制输入约束。然后,利用UDE估计外部扰动,并将估计值反馈到控制器中,以补偿扰动的影响。整个系统采用模块化设计,控制器和估计器可以独立设计和优化。
关键创新:本文的关键创新在于将CCM和UDE相结合,设计了一个模块化的鲁棒神经控制框架。CCM保证了系统的基本稳定性和控制约束,UDE提高了系统的抗扰动能力。这种模块化设计使得控制器和估计器的设计更加灵活和高效。此外,使用神经控制器可以更好地处理系统的非线性特性。
关键设计:CCM控制器的设计需要选择合适的收缩率和李雅普诺夫函数。UDE的设计需要选择合适的滤波器参数,以保证扰动估计的精度和稳定性。神经控制器的网络结构和训练方法需要根据具体的系统模型和控制目标进行调整。控制输入饱和约束通过在CCM设计中引入饱和函数来实现。
🖼️ 关键图片


📊 实验亮点
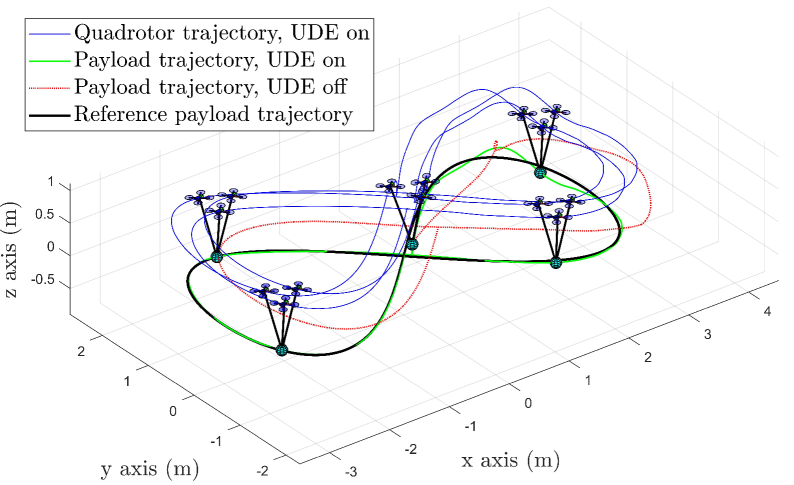
仿真结果表明,所提出的控制设计能够在外部扰动下跟踪复杂的轨迹,并实现零轨迹跟踪误差(在扰动满足一定假设的条件下)。该方法在保证系统稳定性的同时,能够有效地抑制外部扰动的影响,提高了系统的鲁棒性。虽然论文中没有明确给出与特定基线的对比数据,但其仿真结果展示了在复杂扰动下的有效性。
🎯 应用场景
该研究成果可应用于物流运输、建筑施工、灾害救援等领域,实现多无人机协同搬运重物,提高作业效率和安全性。例如,在灾区,可以使用多无人机系统将救援物资运送到难以到达的地点。在建筑工地,可以使用多无人机系统吊装大型构件,减少人力成本和安全风险。该技术还可扩展到其他多智能体协同控制领域。
📄 摘要(原文)
This paper presents a robust neural control design for a three-drone slung payload transportation system to track a reference path under external disturbances. The control contraction metric (CCM) is used to generate a neural exponentially converging baseline controller while complying with control input saturation constraints. We also incorporate the uncertainty and disturbance estimator (UDE) technique to dynamically compensate for persistent disturbances. The proposed framework yields a modularized design, allowing the controller and estimator to perform their individual tasks and achieve a zero trajectory tracking error if the disturbances meet certain assumptions. The stability and robustness of the complete system, incorporating both the CCM controller and the UDE compensator, are presented. Simulations are conducted to demonstrate the capability of the proposed control design to follow complicated trajectories under external disturbances.