Spatiotemporal Forecasting of Incidents and Congestion with Implications for Sustainable Traffic Control
作者: Tony Kinchen, Ting Bai, Nishanth Venkatesh S., Andreas A. Malikopoulos
分类: eess.SY
发布日期: 2025-09-29
💡 一句话要点
提出时空预测框架,用于城市交通事件和拥堵预测,支持可持续交通控制。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱八:物理动画 (Physics-based Animation)
关键词: 交通预测 时空预测 深度学习 交通仿真 事件检测 拥堵预测 可持续交通
📋 核心要点
- 城市交通异常对交通系统构成威胁,现有方法难以准确预测和评估其影响。
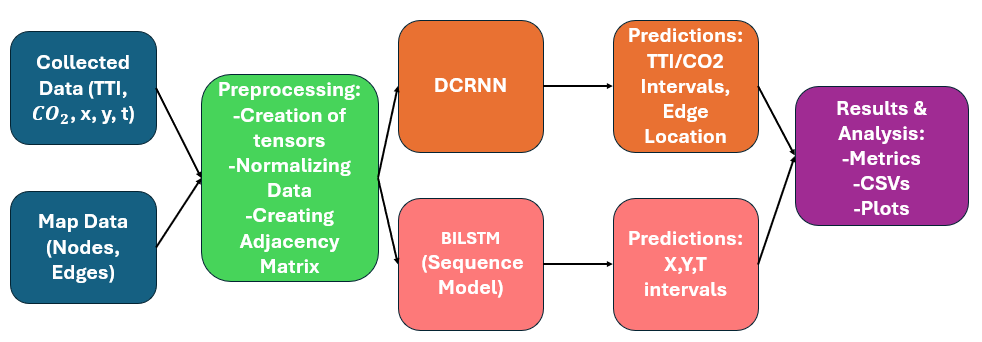
- 提出一种混合预测架构,结合双向LSTM和扩散卷积循环神经网络,捕捉时空依赖性。
- 在SUMO仿真平台上验证了框架的有效性,能够重现事件条件并提供准确的交通预测。
📝 摘要(中文)
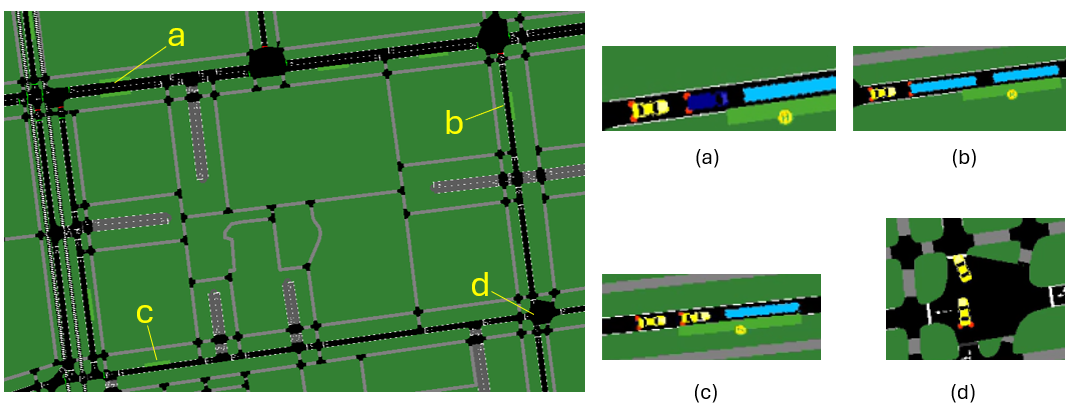
城市交通异常,如碰撞和中断,威胁着交通系统的安全性、效率和可持续性。本文提出了一个基于仿真的框架,用于建模、检测和预测城市网络中的此类异常。使用SUMO平台,我们生成了可复现的追尾和交叉口碰撞场景,并匹配了基线,从而实现了可控的实验和比较评估。我们记录了车辆级别的行驶时间、速度和排放,用于边缘和网络级别的分析。在此数据集上,我们开发了一种混合预测架构,该架构结合了双向长短期记忆网络和扩散卷积循环神经网络,以捕获时间动态和空间依赖性。我们在纽约市百老汇走廊上的仿真研究表明,该框架能够重现一致的事件条件,量化其影响,并提供准确的多时域交通预测。我们的结果突出了将受控异常生成与深度预测模型相结合的价值,以支持可复现的评估和可持续的交通管理。
🔬 方法详解
问题定义:论文旨在解决城市交通网络中事件(如碰撞)和拥堵的时空预测问题。现有方法通常难以同时捕捉交通流的时间动态和空间依赖性,并且缺乏在可控环境下进行实验和评估的框架。
核心思路:论文的核心思路是结合仿真技术生成可控的交通异常场景,并利用深度学习模型学习交通流的时空特征,从而实现准确的事件和拥堵预测。通过仿真,可以获得大量带有标签的数据,用于训练和评估模型。
技术框架:该框架包含三个主要模块:1) 基于SUMO的交通仿真模块,用于生成包含事件和拥堵的交通流数据;2) 数据处理模块,用于提取车辆级别的行驶时间、速度和排放等特征;3) 混合预测模型,结合双向LSTM和扩散卷积循环神经网络,用于预测未来的交通状态。整体流程是先通过仿真生成数据,然后对数据进行预处理,最后使用混合模型进行预测。
关键创新:该论文的关键创新在于结合了仿真技术和深度学习模型,提出了一种可控、可复现的交通异常预测框架。与传统方法相比,该框架能够更好地捕捉交通流的时空依赖性,并且可以在可控环境下进行实验和评估。扩散卷积循环神经网络的使用是另一个创新点,它可以有效地处理交通网络中的空间依赖性。
关键设计:在混合预测模型中,双向LSTM用于捕捉时间序列的动态变化,扩散卷积循环神经网络用于捕捉空间依赖性。模型的损失函数通常采用均方误差或平均绝对误差。SUMO仿真平台的参数设置,如车辆密度、驾驶行为等,会影响仿真结果,需要根据实际情况进行调整。扩散卷积循环神经网络中的扩散核的选择也会影响模型的性能。
🖼️ 关键图片
📊 实验亮点
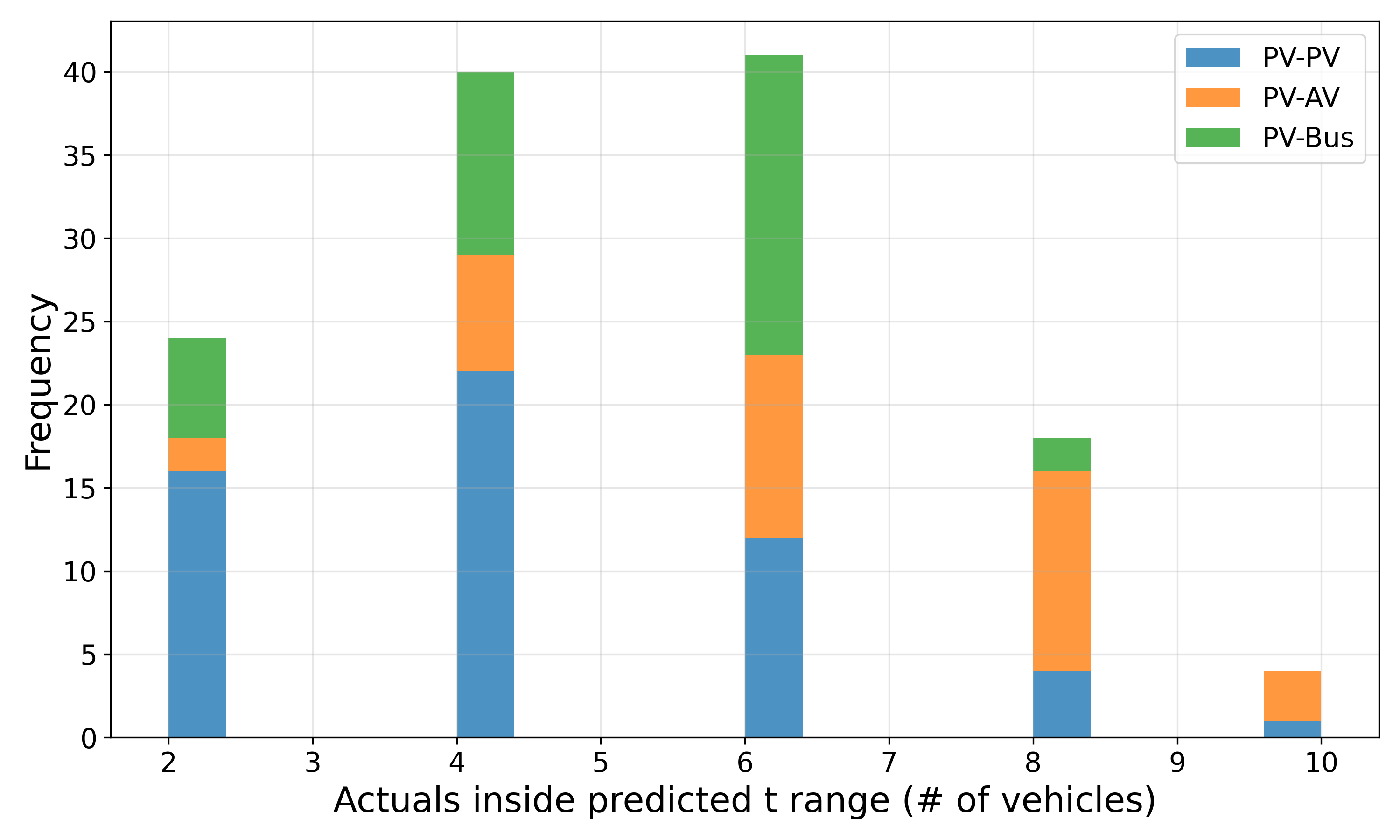
在纽约市百老汇走廊的仿真实验表明,该框架能够重现一致的事件条件,量化其影响,并提供准确的多时域交通预测。具体性能数据未知,但论文强调了该框架在可控环境下进行实验和评估的价值,以及深度预测模型在交通管理中的潜力。
🎯 应用场景
该研究成果可应用于智能交通管理系统,为交通管理者提供实时的交通状态预测,辅助决策,例如提前调整信号灯配时、发布交通诱导信息等,从而缓解交通拥堵、减少事故发生,提高交通效率和安全性,并最终实现可持续的交通控制。
📄 摘要(原文)
Urban traffic anomalies such as collisions and disruptions threaten the safety, efficiency, and sustainability of transportation systems. We present a simulation-based framework for modeling, detecting, and predicting such anomalies in urban networks. Using the SUMO platform, we generate reproducible rear-end and intersection crash scenarios with matched baselines, enabling controlled experimentation and comparative evaluation. We record vehicle-level travel time, speed, and emissions for edge and network-level analysis. On this dataset, we develop a hybrid forecasting architecture that combines bidirectional long short-term memory networks with a diffusion convolutional recurrent neural network to capture temporal dynamics and spatial dependencies. Our simulation studies on the Broadway corridor in New York City demonstrate the framework's ability to reproduce consistent incident conditions, quantify their effects, and provide accurate multi-horizon traffic forecasts. Our results highlight the value of combining controlled anomaly generation with deep predictive models to support reproducible evaluation and sustainable traffic management.