SDC-Based Model Predictive Control: Enhancing Computational Feasibility for Safety-Critical Quadrotor Control
作者: Saber Omidi
分类: eess.SY, math.OC
发布日期: 2025-09-29
备注: This is the initial version
💡 一句话要点
提出基于SDC的MPC方法,提升四旋翼飞行器安全控制的计算可行性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼飞行器 模型预测控制 状态依赖系数 非线性控制 实时控制 计算复杂度 安全控制
📋 核心要点
- 非线性模型预测控制(NMPC)在四旋翼等高速机器人控制中应用广泛,但计算量大,难以满足实时性和鲁棒性要求,尤其是在需要避障的环境中。
- 论文提出基于状态依赖系数(SDC)的MPC方法,将非线性动力学重构为线性形式,从而将非线性优化问题转化为序列二次优化问题,降低计算复杂度。
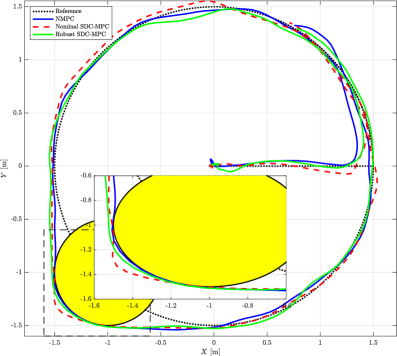
- 仿真结果表明,SDC-MPC在跟踪精度上与NMPC相当,但计算效率更高,更适合实时应用,并且理论分析证明了其稳定性和递归可行性。
📝 摘要(中文)
本文提出了一种基于状态依赖系数(SDC)的MPC框架,旨在提高四旋翼飞行器等高速机器人系统的控制性能。该方法在保持NMPC高精度性能的同时,通过SDC方法重构非线性四旋翼动力学,将原非线性规划问题转化为序列二次优化问题,从而显著降低计算复杂度超过30%。控制器集成了积分作用以消除稳态跟踪误差,并施加约束以实现安全关键的避障。此外,还引入了扰动估计器以增强对外部扰动的鲁棒性。仿真结果表明,基于SDC的MPC在计算时间方面比NMPC更有效,同时实现了相当的跟踪精度,从而提高了其在实时应用中的适用性。理论分析进一步确立了该方法的稳定性和递归可行性。
🔬 方法详解
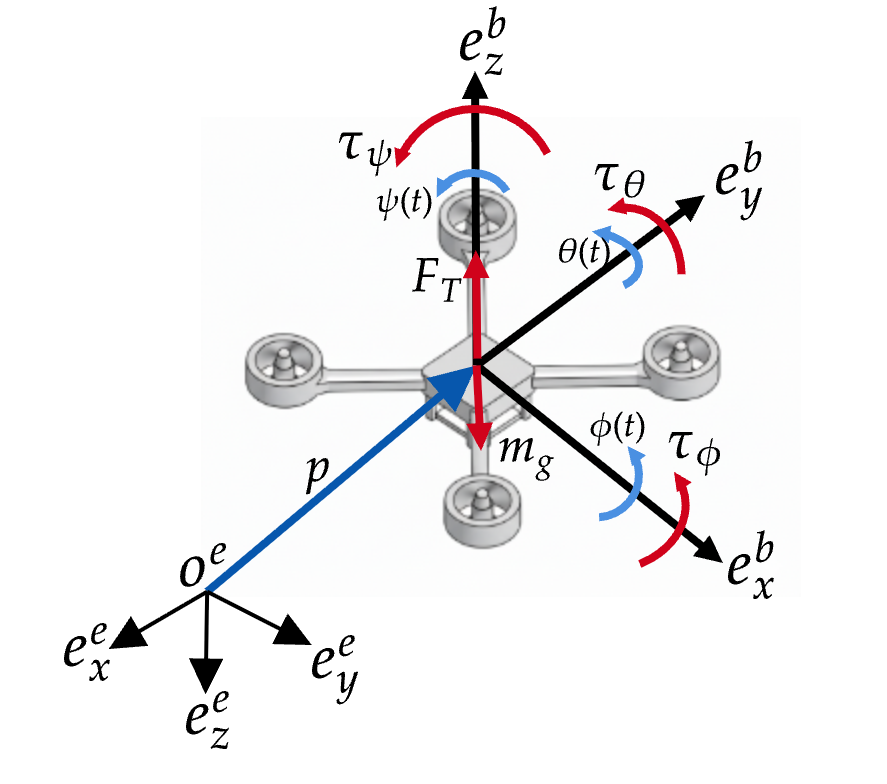
问题定义:本文旨在解决四旋翼飞行器在复杂环境下的实时安全控制问题。传统的非线性模型预测控制(NMPC)虽然精度高,但计算复杂度高,难以满足实时性要求,尤其是在需要进行复杂避障规划时,计算负担会进一步加重。因此,如何在保证控制精度的前提下,降低NMPC的计算复杂度,是本文要解决的核心问题。
核心思路:论文的核心思路是利用状态依赖系数(SDC)方法,将非线性四旋翼动力学方程转化为线性时变形式。这样,原本的非线性优化问题就可以转化为序列二次规划(SQP)问题,从而大大降低计算复杂度。这种方法的核心在于将非线性项分解为状态相关的系数,使得优化过程可以利用线性规划的快速求解器。
技术框架:该SDC-Based MPC框架主要包含以下几个模块:1) 状态依赖系数(SDC)重构模块:将非线性四旋翼动力学方程转化为线性时变形式。2) 模型预测控制(MPC)模块:基于线性化后的模型,设计MPC控制器,实现轨迹跟踪和避障。3) 积分作用模块:引入积分项,消除稳态跟踪误差。4) 扰动估计模块:估计外部扰动,提高系统的鲁棒性。整体流程是,首先通过SDC重构动力学模型,然后利用MPC进行轨迹规划和控制,同时利用积分作用消除稳态误差,并利用扰动估计器补偿外部扰动。
关键创新:该方法最重要的创新点在于将SDC方法引入到四旋翼的MPC控制中,通过将非线性动力学方程转化为线性时变形式,显著降低了MPC的计算复杂度。与传统的NMPC相比,该方法避免了直接求解非线性优化问题,而是通过序列二次规划(SQP)来逼近最优解,从而提高了计算效率。
关键设计:在SDC重构中,需要选择合适的分解方式,以保证线性化模型的精度。MPC控制器的设计需要仔细选择预测时域和控制时域,以平衡控制性能和计算复杂度。积分作用的增益需要仔细调整,以避免引入不稳定因素。扰动估计器的设计需要考虑扰动的特性,选择合适的滤波器参数。
🖼️ 关键图片
📊 实验亮点
仿真结果表明,与传统的NMPC相比,该SDC-Based MPC方法在计算复杂度上降低了超过30%,同时保持了与NMPC相当的跟踪精度。这表明该方法在保证控制性能的前提下,显著提高了计算效率,更适合实时应用。此外,该方法还具有良好的鲁棒性,能够有效抑制外部扰动的影响。
🎯 应用场景
该研究成果可广泛应用于需要高精度、高实时性控制的四旋翼飞行器应用场景,例如:自主巡检、物流配送、灾害救援、农业植保等。通过降低计算复杂度,该方法使得四旋翼飞行器能够在资源受限的嵌入式平台上实现复杂的控制算法,从而拓展了四旋翼飞行器的应用范围。未来,该方法还可以推广到其他非线性系统的控制中。
📄 摘要(原文)
Nonlinear Model Predictive Control (NMPC) is widely used for controlling high-speed robotic systems such as quadrotors. However, its significant computational demands often hinder real-time feasibility and reliability, particularly in environments requiring robust obstacle avoidance. This paper proposes a novel SDC-Based Model Predictive Control (MPC) framework, which preserves the high-precision performance of NMPC while substantially reducing computational complexity by over 30%. By reformulating the nonlinear quadrotor dynamics through the State-Dependent Coefficient (SDC) method, the original nonlinear program problem is transformed into a sequential quadratic optimization problem. The controller integrates an integral action to eliminate steady-state tracking errors and imposes constraints for safety-critical obstacle avoidance. Additionally, a disturbance estimator is incorporated to enhance robustness against external perturbations. Simulation results demonstrate that the SDC-Based MPC achieves comparable tracking accuracy to NMPC, with greater efficiency in terms of computation times, thereby improving its suitability for real-time applications. Theoretical analysis further establishes the stability and recursive feasibility of the proposed approach.