Conceptualizing and Modeling Communication-Based Cyberattacks on Automated Vehicles
作者: Tianyi Li, Tianyu Liu, Yicheng Yang
分类: eess.SY, cs.RO
发布日期: 2025-09-28
💡 一句话要点
针对自动驾驶车辆通信攻击,提出形式化建模与风险评估方法
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 自动驾驶 网络安全 通信攻击 自适应巡航控制 风险评估 电动汽车 内燃机汽车
📋 核心要点
- 现有研究缺乏对不同动力类型车辆在通信攻击下的网络弹性量化分析,尤其是在ACC普及的背景下。
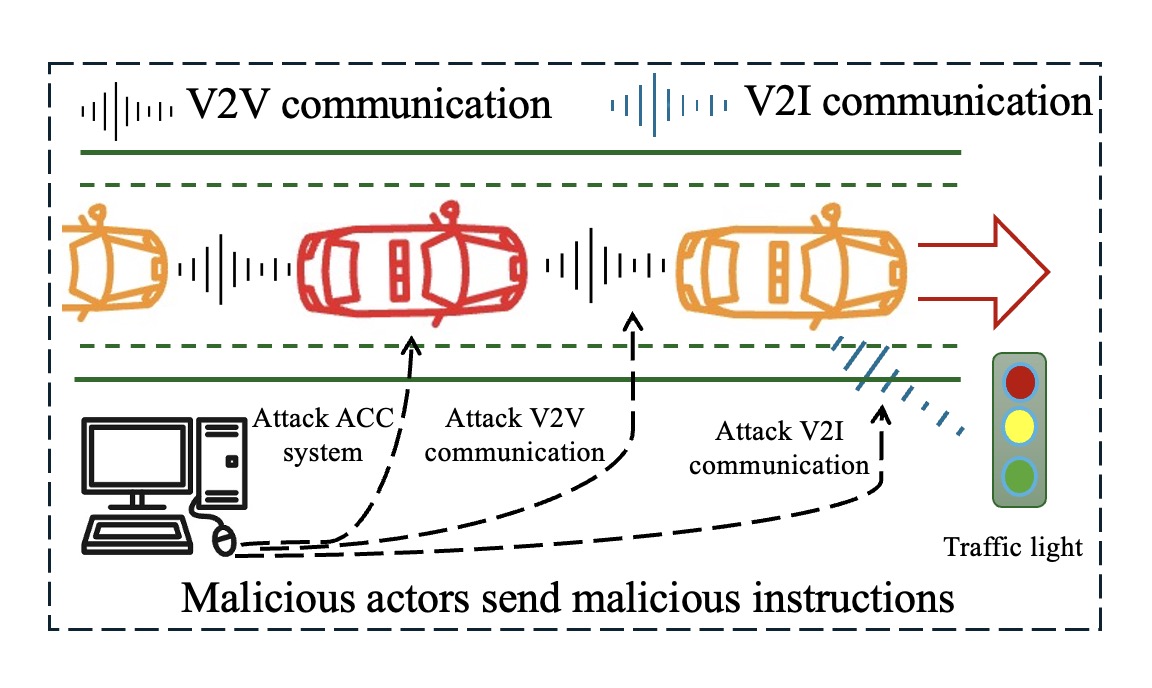
- 论文形式化了六种消息级攻击向量,并构建了三层风险分类法,将干扰指标转化为可操作的防御优先级。
- 仿真结果表明,电动汽车在面对通信攻击时,相比内燃机汽车具有更强的稳定性和更快的恢复能力。
📝 摘要(中文)
自适应巡航控制(ACC)在电动汽车(EV)和内燃机汽车(ICE)中迅速普及,在提高交通流量的同时,也扩大了基于通信的网络攻击的攻击面。由于两种动力总成将控制输入转化为运动的方式不同,它们的网络弹性仍未被量化。因此,本文形式化了六种新的消息级攻击向量,并在环路仿真中实施,系统地改变了ACC市场渗透率(MPR)和受损车辆的空间模式。一个三层风险分类法将干扰指标转化为从业者可操作的防御优先级。在所有仿真场景中,与ICE车辆相比,EV车队表现出更低的平均速度标准差、更小的间距振荡和更快的攻击后恢复,揭示了固有的稳定性优势。这些发现阐明了控制器到动力总成的耦合如何影响漏洞,并为混合自动驾驶交通中的攻击检测和缓解提供定量指导。
🔬 方法详解
问题定义:论文旨在解决自动驾驶车辆,特别是配备自适应巡航控制(ACC)的车辆,在面对基于通信的网络攻击时的脆弱性问题。现有方法未能充分量化不同动力类型(电动汽车和内燃机汽车)车辆在遭受此类攻击时的网络弹性差异,也缺乏有效的风险评估和防御优先级划分方法。
核心思路:论文的核心思路是通过形式化建模通信攻击向量,并结合环路仿真,系统地评估不同动力类型车辆在不同市场渗透率和攻击模式下的性能表现。通过构建三层风险分类法,将仿真结果转化为可操作的防御策略。
技术框架:论文的技术框架主要包括以下几个阶段:1) 形式化定义六种消息级攻击向量;2) 构建环路仿真环境,模拟混合交通流,并系统地改变ACC市场渗透率和受损车辆的空间分布;3) 实施攻击,并收集车辆的速度、间距等性能指标;4) 构建三层风险分类法,将性能指标转化为风险等级和防御优先级。
关键创新:论文的关键创新在于:1) 首次形式化定义了针对ACC系统的六种消息级攻击向量;2) 提出了一个三层风险分类法,能够将仿真结果转化为可操作的防御策略;3) 通过对比电动汽车和内燃机汽车在相同攻击下的性能表现,揭示了电动汽车在网络弹性方面的固有优势。
关键设计:论文的关键设计包括:1) 攻击向量的设计,针对ACC系统的通信协议和控制逻辑;2) 环路仿真环境的构建,考虑了混合交通流和不同的市场渗透率;3) 三层风险分类法的构建,将性能指标映射到风险等级和防御优先级。
🖼️ 关键图片


📊 实验亮点
仿真结果表明,在所有场景下,电动汽车车队相比内燃机汽车车队表现出更低的平均速度标准差、更小的间距振荡和更快的攻击后恢复。这表明电动汽车在面对通信攻击时具有更强的固有稳定性。该研究为混合自动驾驶交通中的攻击检测和缓解提供了定量的指导。
🎯 应用场景
该研究成果可应用于自动驾驶车辆的网络安全评估和防御系统设计。通过量化不同攻击场景下的风险,可以帮助汽车制造商和监管机构制定更有效的安全策略,提高自动驾驶系统的整体安全性。此外,该研究也为未来混合自动驾驶交通环境下的安全控制策略设计提供了参考。
📄 摘要(原文)
Adaptive Cruise Control (ACC) is rapidly proliferating across electric vehicles (EVs) and internal combustion engine (ICE) vehicles, enhancing traffic flow while simultaneously expanding the attack surface for communication-based cyberattacks. Because the two powertrains translate control inputs into motion differently, their cyber-resilience remains unquantified. Therefore, we formalize six novel message-level attack vectors and implement them in a ring-road simulation that systematically varies the ACC market penetration rates (MPRs) and the spatial pattern of compromised vehicles. A three-tier risk taxonomy converts disturbance metrics into actionable defense priorities for practitioners. Across all simulation scenarios, EV platoons exhibit lower velocity standard deviation, reduced spacing oscillations, and faster post-attack recovery compared to ICE counterparts, revealing an inherent stability advantage. These findings clarify how controller-to-powertrain coupling influences vulnerability and offer quantitative guidance for the detection and mitigation of attacks in mixed automated traffic.