Certified Learning-Enabled Noise-Aware Motion Planning for Urban Air Mobility
作者: Jaejeong Park, Mahmoud Elfar, Cody Fleming, Yasser Shoukry
分类: eess.SY
发布日期: 2025-09-24
备注: 16 pages, 10 figures
💡 一句话要点
针对城市空中交通,提出可认证的噪声感知运动规划方法。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 城市空中交通 噪声感知 运动规划 可认证神经网络 主动采样
📋 核心要点
- 城市空中交通面临噪声污染挑战,现有方法难以兼顾噪声控制和运营效率。
- 提出一种噪声感知的运动规划框架,利用可认证神经网络预测噪声传播,并结合主动采样策略。
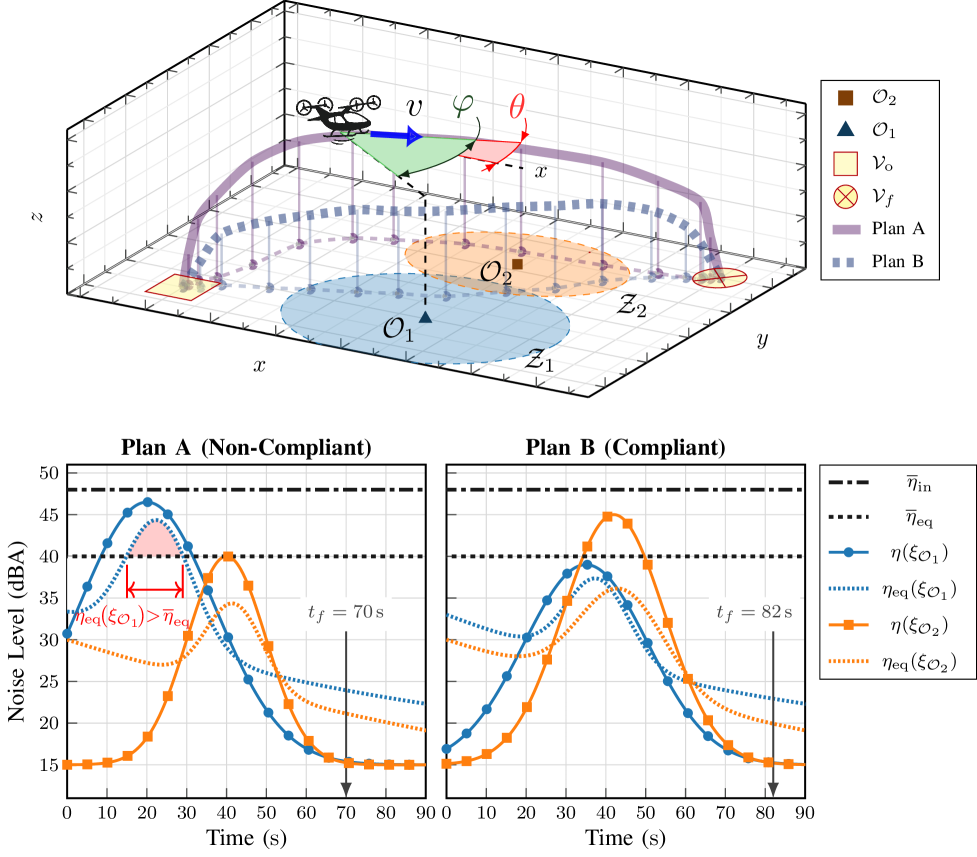
- 实验表明,该框架能为eVTOL机队生成符合噪声法规的飞行计划,同时优化运营效率。
📝 摘要(中文)
城市空中交通(UAM)作为缓解城市拥堵和交通挑战的一种有前景的解决方案正在兴起。然而,eVTOL飞机产生的噪声对公众接受度和监管审批构成了重大障碍,可能限制UAM系统的运营范围和可扩展性。因此,UAM系统的成功应用取决于预测噪声水平的能力,并进一步开发符合社区噪声法规同时保持运营效率的运动规划策略。为此,本文提出了一种新颖的UAM系统噪声感知运动规划框架,该框架可确保符合噪声法规。我们首先开发了一个可认证的神经网络模型,以准确预测城市环境中eVTOL噪声传播模式,并提供其正确性的可证明界限。为了达到期望的精度水平,我们提出了一种主动采样策略,以有效地构建用于训练和测试噪声模型的数据集。接下来,我们开发了一种噪声感知运动规划算法,该算法利用噪声模型来生成保证符合社区噪声法规的eVTOL轨迹。该算法利用噪声模型的单调结构来有效地采样配置空间,从而确保生成的轨迹既符合噪声要求又具有运营效率。我们通过Vahana eVTOL的大量实验证明了所提出框架的有效性。结果表明,该框架可以为符合社区噪声法规的eVTOL机队生成符合噪声要求的飞行计划,同时优化运营效率。
🔬 方法详解
问题定义:论文旨在解决城市空中交通(UAM)中,电动垂直起降飞行器(eVTOL)的噪声污染问题。现有运动规划方法通常忽略噪声影响,或者噪声模型精度不足,导致无法有效控制噪声水平,影响公众接受度和监管审批。因此,需要在满足噪声法规的前提下,实现高效的飞行轨迹规划。
核心思路:论文的核心思路是构建一个可认证的噪声预测模型,并将其集成到运动规划算法中。通过主动采样策略高效地训练噪声模型,并利用模型的单调性加速运动规划过程,从而在保证噪声合规性的同时,优化运营效率。
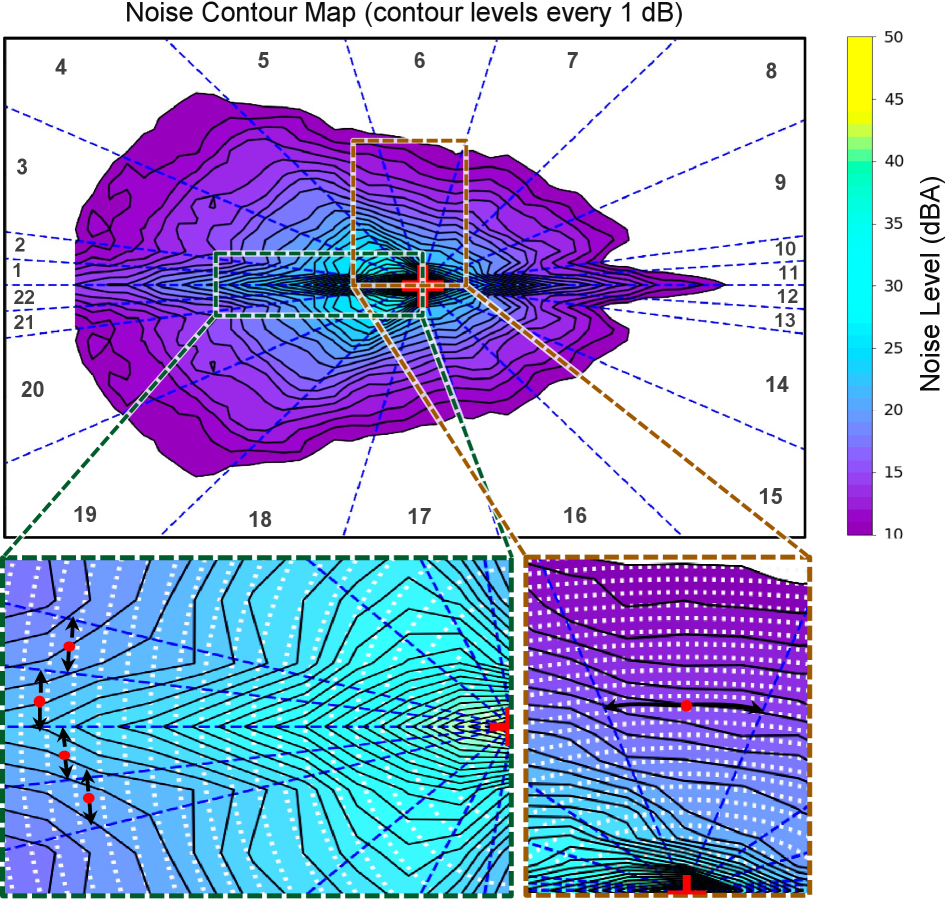
技术框架:该框架包含两个主要模块:1) 可认证的噪声预测模型:使用神经网络预测eVTOL在城市环境中的噪声传播,并提供预测结果的置信区间。2) 噪声感知运动规划算法:利用噪声模型生成符合噪声法规的eVTOL轨迹。该算法通过采样配置空间,并评估轨迹的噪声水平,最终选择满足要求的最优轨迹。
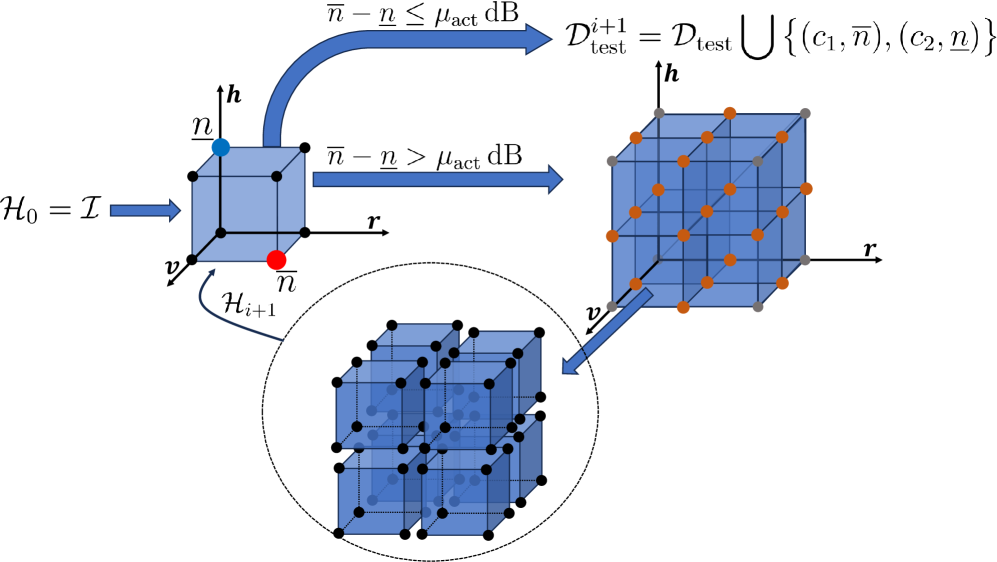
关键创新:论文的关键创新在于:1) 提出了一个可认证的神经网络噪声模型,能够提供噪声预测结果的置信区间,保证了规划的安全性。2) 提出了一种主动采样策略,能够高效地构建训练数据集,提高噪声模型的精度。3) 利用噪声模型的单调性,加速了运动规划过程,提高了算法的效率。
关键设计:噪声模型采用神经网络结构,损失函数包括预测误差和认证损失,用于保证预测结果的置信度。主动采样策略根据当前模型的预测不确定性选择新的采样点,以提高模型的泛化能力。运动规划算法采用采样-验证框架,利用噪声模型的单调性减少采样次数。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该框架能够为Vahana eVTOL生成符合社区噪声法规的飞行计划,并且在满足噪声约束的同时,优化了飞行时间和能耗。与传统方法相比,该方法能够显著降低噪声水平,并提高运营效率。具体性能数据未知,但实验验证了该框架的有效性。
🎯 应用场景
该研究成果可应用于城市空中交通管理系统,为eVTOL飞行器提供噪声感知的飞行规划,降低噪声污染,提高公众接受度,促进UAM系统的商业化落地。此外,该方法也可推广到其他噪声敏感场景,如无人机配送、城市物流等。
📄 摘要(原文)
Urban Air Mobility (UAM) has emerged as a promising solution to alleviate urban congestion and transportation challenges. Nevertheless, the noise generated by eVTOL aircrafts poses a significant barrier to public acceptance and regulatory approval, potentially limiting the operational scope and scalability of UAM systems. Hence, the successful adoption of UAM systems hinges on the ability to predict generated noise levels, and further develop motion planning strategies that comply with community-level noise regulations while maintaining operational efficiency. To this end, this paper proposes a novel noise-aware motion planning framework for UAM systems that ensures compliance with noise regulations. We first develop a certifiable neural network model to accurately predict eVTOL noise propagation patterns in urban environments, providing provable bounds on its correctness. To achieve a desired level of accuracy, we propose an active sampling strategy to efficiently build the dataset used to train and test the noise model. Next, we develop a noise-aware motion planning algorithm that utilizes the noise model to generate eVTOL trajectories that guarantee compliance with community noise regulations. The algorithm exploits the monotonic structure of the noise model to efficiently sample the configuration space, ensuring that the generated trajectories are both noise-compliant and operationally efficient. We demonstrate the effectiveness of the proposed framework through a number of experiments for Vahana eVTOLs. The results show that the framework can generate noise-compliant flight plans for a fleet of eVTOLs that adhere to community noise regulations while optimizing operational efficiency.