Control and Navigation of a 2-D Electric Rocket
作者: André Fonte, Pedro Santos, Paulo Oliveira
分类: eess.SY
发布日期: 2025-09-24
💡 一句话要点
针对二维电火箭,提出基于LQR和卡尔曼滤波的控制与导航方案
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 电火箭 控制系统 导航系统 线性二次调节器 卡尔曼滤波 轨迹跟踪 状态估计
📋 核心要点
- 现有电火箭控制方法难以兼顾欠驱动和状态耦合的复杂性,导致控制精度受限。
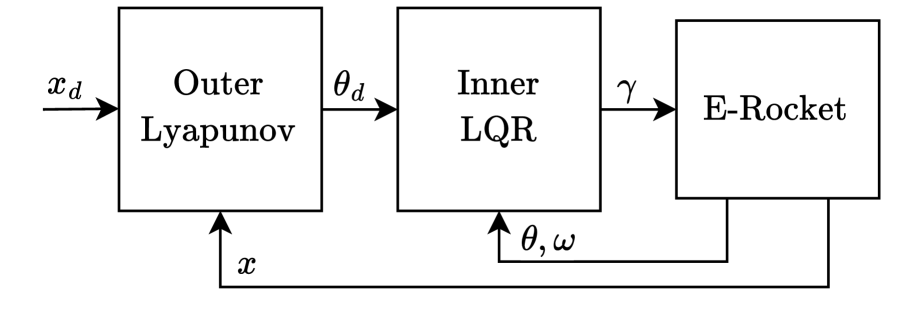
- 采用模块化分层控制架构,结合LQR控制器和李雅普诺夫理论,实现精确轨迹跟踪。
- 通过MATLAB/Simulink仿真验证,揭示了横向控制的局限性,为未来研究方向提供指导。
📝 摘要(中文)
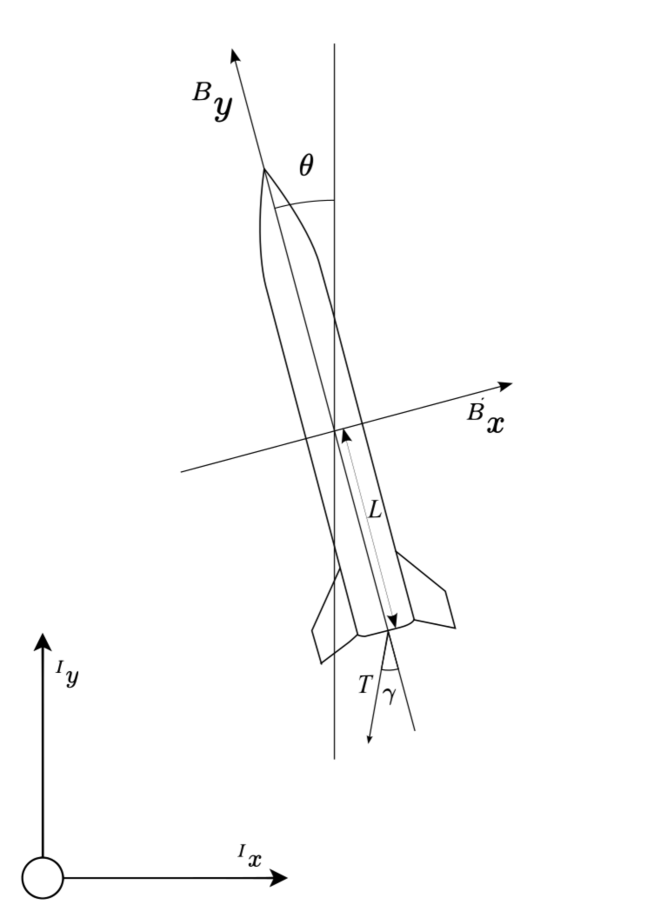
本文研究了二维电火箭的控制与导航问题,建立了一个简化的模型,忽略了执行器动力学和空气动力学效应,但保留了欠驱动和状态耦合的复杂性。通过模块化和分层的控制架构实现轨迹跟踪,该架构采用了线性二次调节器(LQR)和李雅普诺夫理论。导航模块采用卡尔曼滤波技术实现全状态估计。在定制的MATLAB/Simulink测试平台中对解决方案进行了全面评估,该平台模拟了真实世界的条件,同时保持了简化的设置。结果表明,横向轴存在局限性,建议在未来的工作中解决。
🔬 方法详解
问题定义:本文旨在解决二维电火箭的轨迹跟踪和状态估计问题。现有方法在处理欠驱动系统和状态耦合时存在不足,难以实现精确控制。此外,缺乏考虑真实环境因素的简化仿真平台,限制了算法的验证和改进。
核心思路:核心思路是将控制系统设计为模块化和分层的结构,利用LQR控制器实现轨迹跟踪,并结合李雅普诺夫理论保证系统稳定性。同时,采用卡尔曼滤波进行全状态估计,提高导航精度。通过简化模型和仿真环境,降低了算法验证的复杂性。
技术框架:整体架构包含控制模块和导航模块。控制模块采用分层结构,上层规划期望轨迹,下层利用LQR控制器实现轨迹跟踪。导航模块利用卡尔曼滤波器融合传感器数据,估计火箭的状态。整个系统在MATLAB/Simulink环境中进行仿真验证。
关键创新:关键创新在于将LQR控制与李雅普诺夫理论相结合,保证了轨迹跟踪的稳定性和精度。同时,采用卡尔曼滤波进行全状态估计,提高了导航的准确性。此外,提出的简化模型和仿真环境,为电火箭控制算法的开发和验证提供了一个有效的平台。
关键设计:LQR控制器的权重矩阵Q和R需要根据具体任务进行调整,以平衡控制精度和能量消耗。卡尔曼滤波器的过程噪声和测量噪声的协方差矩阵也需要根据传感器特性和系统动态进行调整。仿真环境中的参数设置需要尽可能接近真实环境,以保证仿真结果的有效性。
🖼️ 关键图片
📊 实验亮点
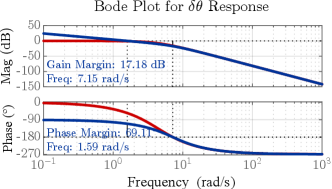
通过MATLAB/Simulink仿真验证,该方法能够实现二维电火箭的轨迹跟踪和状态估计。仿真结果表明,该方法在纵向控制方面表现良好,但在横向控制方面存在局限性。未来的工作将集中于解决横向控制问题,以提高整体控制性能。
🎯 应用场景
该研究成果可应用于小型卫星、空间探测器等航天器的姿态控制和轨道控制。通过精确的轨迹跟踪和状态估计,可以提高航天器的任务执行效率和安全性。此外,该研究提出的简化模型和仿真环境,可用于电火箭控制算法的快速原型设计和验证。
📄 摘要(原文)
This work addresses the control and navigation of a simulated two-dimensional electric rocket. The model provides a simplified framework that neglects actuator dynamics and aerodynamic effects while capturing the complexities of underactuation and state coupling. Trajectory tracking is achieved through a modularized and layered control architecture, with employement of a Linear Quadratic Regulator (LQR) and Lyapunov theory. Full-state estimation is achieved through Kalman filtering techniques, part of the navigation module. The solutions are thoroughly evaluated in a custom-built MATLAB/Simulink testbed, simulating real-world conditions while maintaining a simplified setup. The results reveal limitations along the lateral axis, whose resolution is suggested for future work.