A Game-Theoretic Predictive Control Framework with Statistical Collision Avoidance Constraints for Autonomous Vehicle Overtaking
作者: Sheng Yu, Boli Chen, Imad M. Jaimoukha, Simos A. Evangelou
分类: eess.SY
发布日期: 2025-09-16
💡 一句话要点
提出基于博弈论预测控制的自主超车框架,解决混合交通中人车交互的避撞问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主超车 博弈论 预测控制 混合交通 人车交互
📋 核心要点
- 现有自主超车方法难以应对混合交通中人车交互的不确定性,导致安全性降低。
- GT-PRO策略通过博弈论预测控制,解耦纵向和横向动力学,并预测人类驾驶员的反应。
- 仿真结果表明,GT-PRO在安全、效率和舒适性方面优于现有方法,并具备实时性。
📝 摘要(中文)
本文提出了一种用于混合交通环境中互联自动驾驶车辆(CAV)自主超车的控制框架,其中被超车辆是非互联但具有交互行为的人工驾驶车辆。该方法名为博弈论预测超车(GT-PRO)策略,成功地解耦了CAV的纵向和横向车辆动力学,并通过创新的基于模型预测控制(MPC)的纵向和横向控制器全面协调这些解耦的动力学。为了解决人工驾驶被超车辆的实时交互行为,横向控制器通过动态Stackelberg博弈的双层优化直接控制CAV的横向运动,并预测被超车辆的纵向响应,随后与控制CAV纵向运动的随机MPC共享。该策略利用了一个全面的真实世界数据集,该数据集捕捉了人类驾驶员在被超车时的反应,根据最常见的人类反应调整博弈论横向控制器,并对人类不确定性进行统计表征,从而为随机纵向控制器实施碰撞避免概率约束。被超车辆的礼貌和激进人类反应案例研究的仿真结果表明,与文献中现有的自主超车方法相比,所提出的GT-PRO可以为这种范围的人类驾驶员反应实现更安全、更高效和更舒适的自主超车。此外,结果表明GT-PRO方法能够实时实现。
🔬 方法详解
问题定义:论文旨在解决混合交通环境中,自主车辆(CAV)在超车过程中,如何安全有效地与人工驾驶车辆进行交互的问题。现有方法通常难以准确预测人工驾驶车辆的行为,导致超车过程存在安全隐患,效率较低,舒适性也难以保证。尤其是在被超车辆驾驶员行为具有不确定性和交互性的情况下,传统的控制策略难以适应。
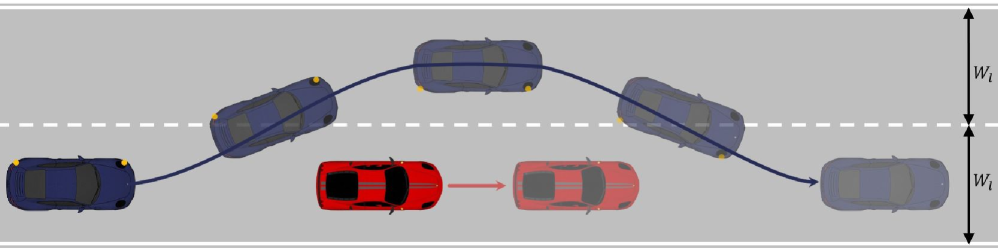
核心思路:论文的核心思路是将自主超车问题建模为一个动态Stackelberg博弈,其中自主车辆作为领导者,人工驾驶车辆作为跟随者。自主车辆通过预测人工驾驶车辆的反应,优化自身的横向运动轨迹,同时将预测结果传递给纵向控制器,实现纵向和横向运动的协同控制。这种博弈论的方法能够更好地应对人工驾驶车辆行为的不确定性,提高超车过程的安全性和效率。
技术框架:GT-PRO框架主要包含以下几个模块:1) 横向控制器:基于动态Stackelberg博弈的双层优化,用于控制CAV的横向运动,并预测被超车辆的纵向响应。2) 纵向控制器:基于随机MPC,利用横向控制器提供的预测信息,控制CAV的纵向运动,并实施碰撞避免概率约束。3) 人类驾驶员行为模型:利用真实世界数据集,对人类驾驶员在被超车时的反应进行建模,用于调整横向控制器和表征人类不确定性。
关键创新:论文的关键创新在于:1) 将自主超车问题建模为动态Stackelberg博弈,能够更好地应对人工驾驶车辆行为的不确定性。2) 提出了纵向和横向解耦的控制架构,并通过博弈论和预测控制实现协同控制。3) 利用真实世界数据集对人类驾驶员行为进行建模,提高了预测的准确性,并为碰撞避免概率约束提供了依据。
关键设计:横向控制器采用双层优化结构,上层优化目标是最小化CAV的横向偏差和控制输入,下层优化目标是模拟人工驾驶车辆的反应。纵向控制器采用随机MPC,考虑了人类驾驶员行为的不确定性,并设置了碰撞避免概率约束,以保证超车过程的安全性。人类驾驶员行为模型基于真实世界数据集进行训练,并根据驾驶员的礼貌或激进程度进行调整。
🖼️ 关键图片


📊 实验亮点
仿真结果表明,与现有方法相比,GT-PRO策略在安全性和效率方面均有显著提升。在礼貌型驾驶员场景下,GT-PRO能够更平稳地完成超车,减少横向偏差和速度波动。在激进型驾驶员场景下,GT-PRO能够更有效地避免碰撞,保证超车过程的安全性。此外,仿真结果还表明,GT-PRO方法具备实时性,能够满足实际应用的需求。
🎯 应用场景
该研究成果可应用于高级驾驶辅助系统(ADAS)和自动驾驶系统,尤其是在混合交通环境中。通过提高自主超车的安全性、效率和舒适性,可以提升用户体验,并减少交通事故的发生。此外,该方法还可以推广到其他需要与人类进行交互的自主驾驶场景,例如变道、汇入车流等。
📄 摘要(原文)
This work develops a control framework for the autonomous overtaking of connected and automated vehicles (CAVs) in a mixed traffic environment, where the overtaken vehicle is an unconnected but interactive human-driven vehicle. The proposed method, termed the Game-Theoretic, PRedictive Overtaking (GT-PRO) strategy, successfully decouples the longitudinal and lateral vehicle dynamics of the CAV and comprehensively coordinates these decoupled dynamics via innovative longitudinal and lateral model predictive (MPC) based controllers, respectively. To address the real-time interactive behavior of the human-driven overtaken vehicle, a dynamic Stackelberg game-based bilevel optimization is solved by the lateral controller to directly control the CAV lateral motion and predict the overtaken vehicle longitudinal responses that are subsequently shared with a stochastic MPC that governs the CAV longitudinal motion. The proposed strategy exploits a comprehensive real-world dataset, which captures human driver responses when being overtaken, to tune the game-theoretic lateral controller according to the most common human responses, and to statistically characterize human uncertainties and hence implement a collision avoidance chance constraint for the stochastic longitudinal controller. The simulation results for both polite and aggressive human response case studies of the overtaken vehicle demonstrate that the proposed GT-PRO can achieve for this range of human driver responsiveness, safer, more efficient, and more comfortable autonomous overtaking, as compared to existing autonomous overtaking approaches in the literature. Furthermore, the results suggest that the GT-PRO method is capable of real-time implementation.