Model Predictive Control with High-Probability Safety Guarantee for Nonlinear Stochastic Systems
作者: Zishun Liu, Liqian Ma, Yongxin Chen
分类: eess.SY
发布日期: 2025-09-15 (更新: 2025-12-15)
💡 一句话要点
提出一种高概率安全保证的非线性随机系统模型预测控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 随机系统 非线性系统 安全保证 集合侵蚀
📋 核心要点
- 现有随机MPC方法难以处理复杂非线性系统,且难以保证高概率安全性,限制了其在安全关键领域的应用。
- 该论文提出一种基于集合侵蚀的随机MPC方法,将概率安全约束转化为确定性约束,简化了计算并提高了安全性。
- 数值实验验证了该方法的有效性,表明其能够在复杂非线性系统中实现高概率的安全保证,具有实际应用价值。
📝 摘要(中文)
本文提出了一种针对非线性随机系统的模型预测控制(MPC)框架,该框架能够以高概率确保安全性。与现有的大多数随机MPC方案不同,我们的方法采用集合侵蚀(set-erosion)技术,将概率安全约束转化为确定性动力学上较小安全集合上的易于处理的确定性安全约束。因此,我们的方法可以与任何现成的确定性MPC算法兼容。我们方法有效性的关键在于对随机轨迹围绕其标称版本的随机波动的严格界定。我们的方法具有可扩展性,并能保证高概率水平(例如,99.99%)的安全性,使其特别适用于涉及复杂非线性动力学的安全关键型应用。进行了严格的分析以建立理论安全保证,并提供了数值实验来验证所提出的MPC方法的有效性。
🔬 方法详解
问题定义:论文旨在解决非线性随机系统的模型预测控制问题,核心挑战在于如何在存在不确定性的情况下,保证系统运行的安全性,即状态始终保持在安全集合内。现有的随机MPC方法通常计算复杂度高,难以处理复杂的非线性系统,并且难以提供高概率的安全保证,限制了其在安全关键领域的应用。
核心思路:论文的核心思路是利用集合侵蚀(set-erosion)技术,将概率安全约束转化为一个确定性的安全约束。具体来说,通过对安全集合进行侵蚀,得到一个更小的安全集合,使得只要系统的标称轨迹保持在这个更小的安全集合内,就能以高概率保证实际轨迹保持在原始的安全集合内。这样,就可以利用现成的确定性MPC算法来解决随机MPC问题。
技术框架:该方法主要包含以下几个步骤:1. 建立非线性随机系统的动力学模型;2. 定义安全集合;3. 利用随机波动界定方法,计算安全集合的侵蚀量;4. 得到侵蚀后的安全集合;5. 设计确定性MPC控制器,使得系统的标称轨迹保持在侵蚀后的安全集合内。整个框架的关键在于如何计算安全集合的侵蚀量,以及如何设计确定性MPC控制器。
关键创新:该论文的关键创新在于提出了一种基于集合侵蚀的随机MPC方法,该方法能够将概率安全约束转化为确定性约束,从而简化了计算,并提高了安全性。与现有的随机MPC方法相比,该方法具有更高的计算效率和更好的安全性保证。此外,该方法还具有良好的可扩展性,可以应用于各种复杂的非线性随机系统。
关键设计:论文的关键设计包括:1. 如何选择合适的随机波动界定方法,以保证侵蚀量的计算精度;2. 如何设计确定性MPC控制器,以保证系统的标称轨迹能够有效地跟踪目标轨迹,并保持在侵蚀后的安全集合内;3. 如何选择合适的控制参数,以平衡系统的性能和安全性。
🖼️ 关键图片

📊 实验亮点
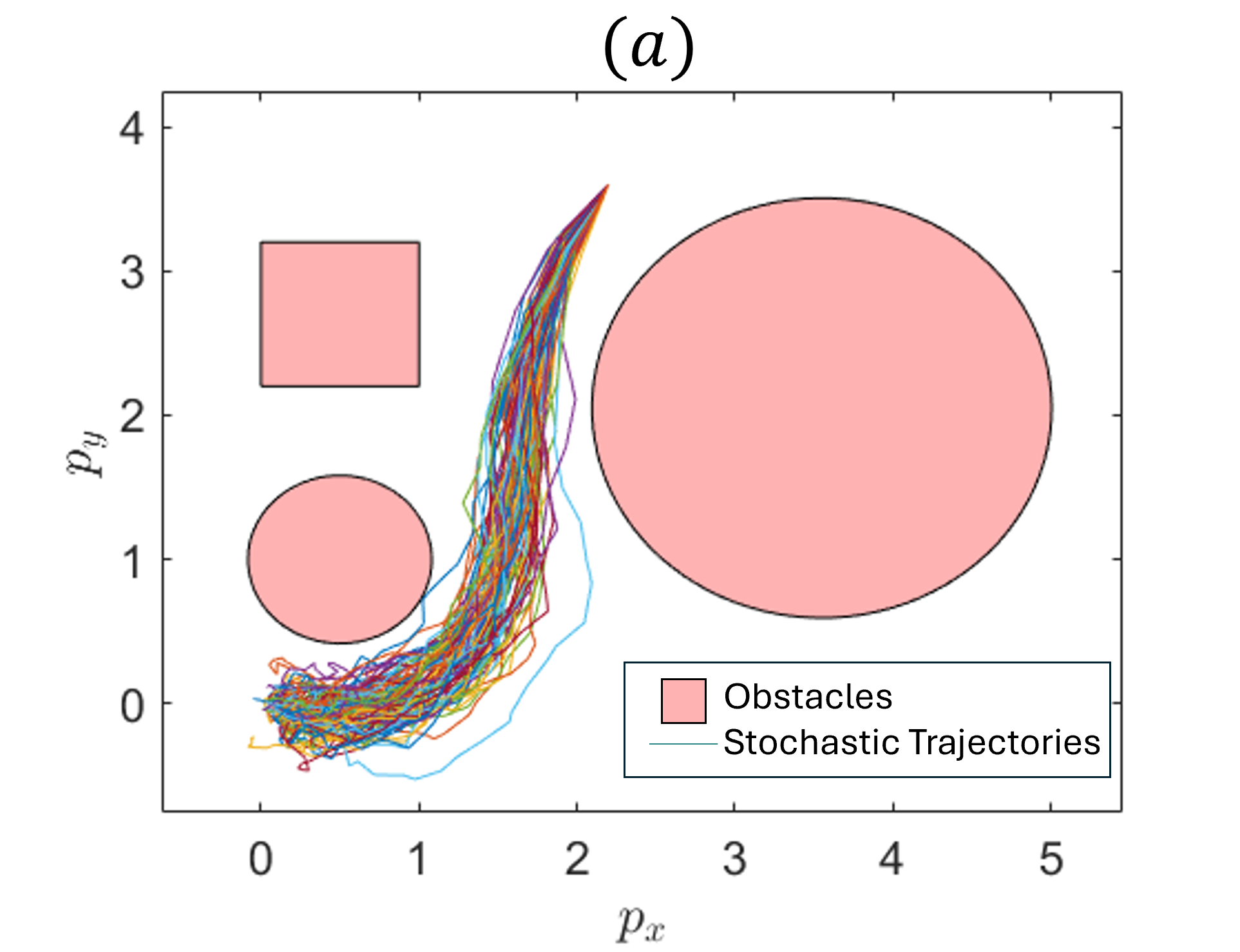
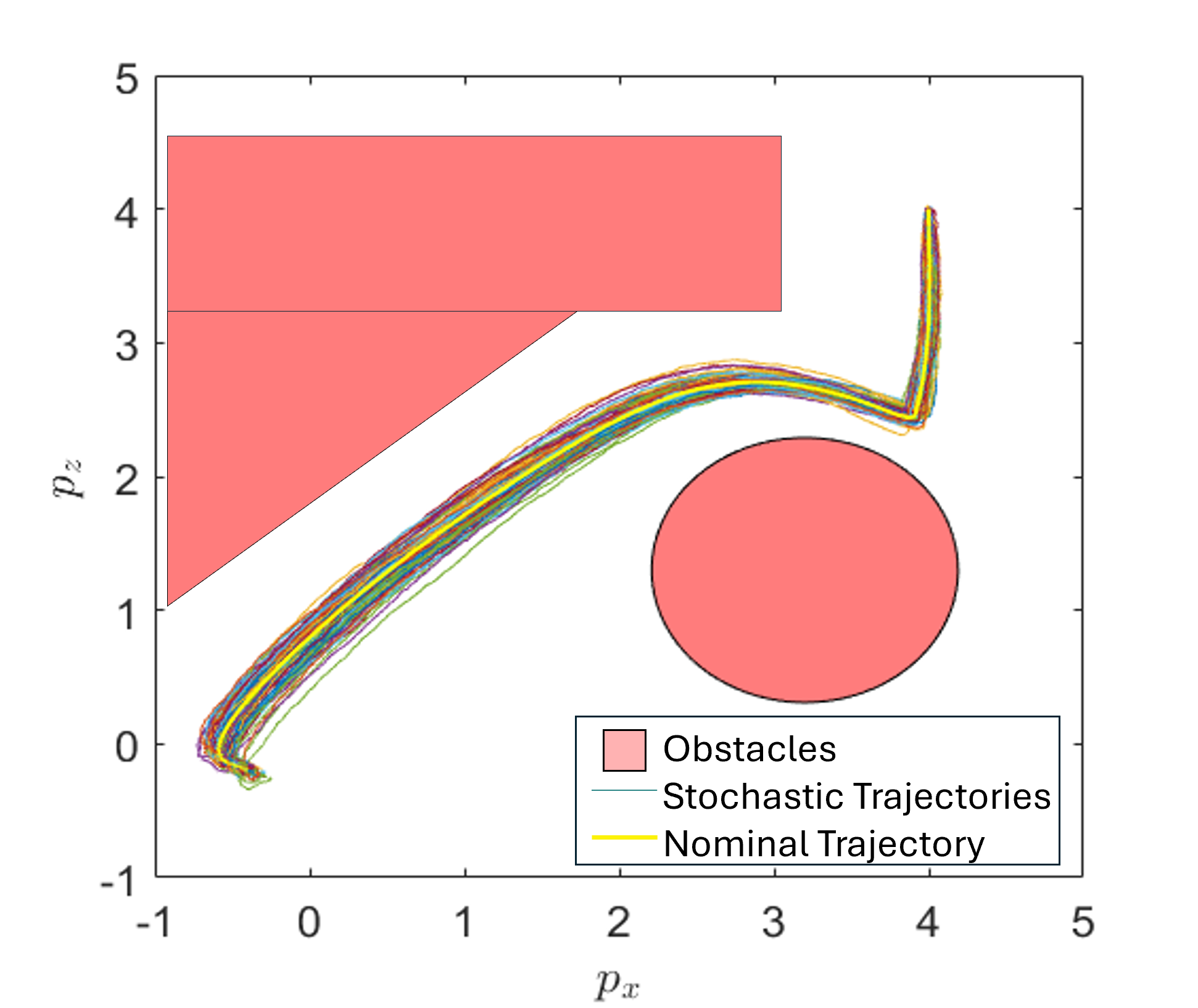
论文通过数值实验验证了所提出的MPC方法的有效性。实验结果表明,该方法能够在复杂非线性系统中实现高概率的安全保证(例如,99.99%)。与传统的随机MPC方法相比,该方法具有更高的计算效率和更好的安全性保证。此外,实验还表明,该方法具有良好的可扩展性,可以应用于各种不同的非线性随机系统。
🎯 应用场景
该研究成果可广泛应用于安全关键型领域,例如自动驾驶、机器人导航、航空航天等。在这些领域中,系统需要在存在不确定性的情况下安全运行,避免发生碰撞或其他危险事件。该方法能够提供高概率的安全保证,从而提高系统的可靠性和安全性,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
We present a model predictive control (MPC) framework for nonlinear stochastic systems that ensures safety guarantee with high probability. Unlike most existing stochastic MPC schemes, our method adopts a set-erosion that converts the probabilistic safety constraint into a tractable deterministic safety constraint on a smaller safe set over deterministic dynamics. As a result, our method is compatible with any off-the-shelf deterministic MPC algorithm. The key to the effectiveness of our method is a tight bound on the stochastic fluctuation of a stochastic trajectory around its nominal version. Our method is scalable and can guarantee safety with high probability level (e.g., 99.99%), making it particularly suitable for safety-critical applications involving complex nonlinear dynamics. Rigorous analysis is conducted to establish a theoretical safety guarantee, and numerical experiments are provided to validate the effectiveness of the proposed MPC method.