Data-fused MPC with Guarantees: Application to Flying Humanoid Robots
作者: Davide Gorbani, Mohamed Elobaid, Giuseppe L'Erario, Hosameldin Awadalla Omer Mohamed, Daniele Pucci
分类: eess.SY, cs.RO
发布日期: 2025-09-12 (更新: 2025-12-16)
备注: This paper has been accepted for publication in IEEE Control Systems Letters (L-CSS)
💡 一句话要点
提出数据融合MPC框架,应用于飞行人形机器人,提升跟踪性能与鲁棒性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型预测控制 数据融合 飞行机器人 人形机器人 Willems基本引理
📋 核心要点
- 现有基于模型的MPC在处理复杂系统(如飞行人形机器人)时,难以准确建模所有动力学,导致跟踪性能下降和鲁棒性不足。
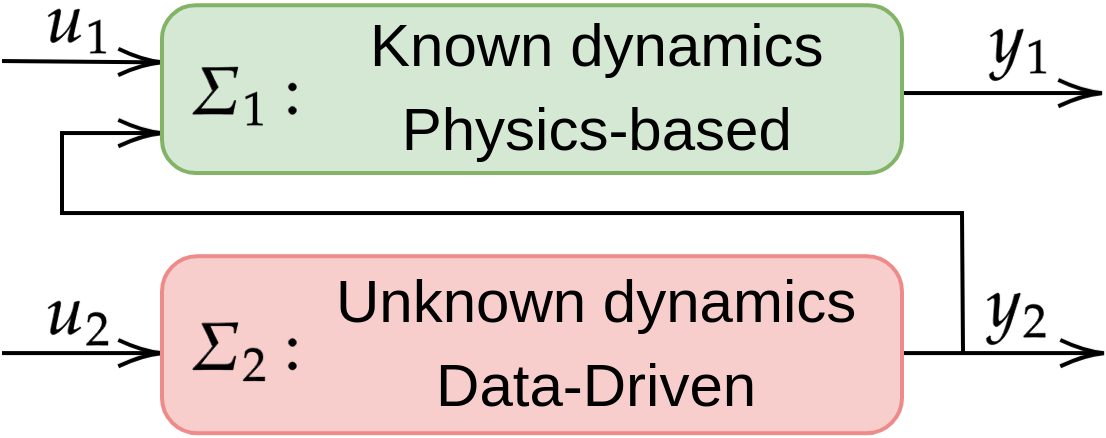
- 该论文提出一种数据融合MPC框架,结合物理模型和数据驱动方法,利用Willems基本引理处理未知动力学,并使用人工平衡公式跟踪变化的目标点。
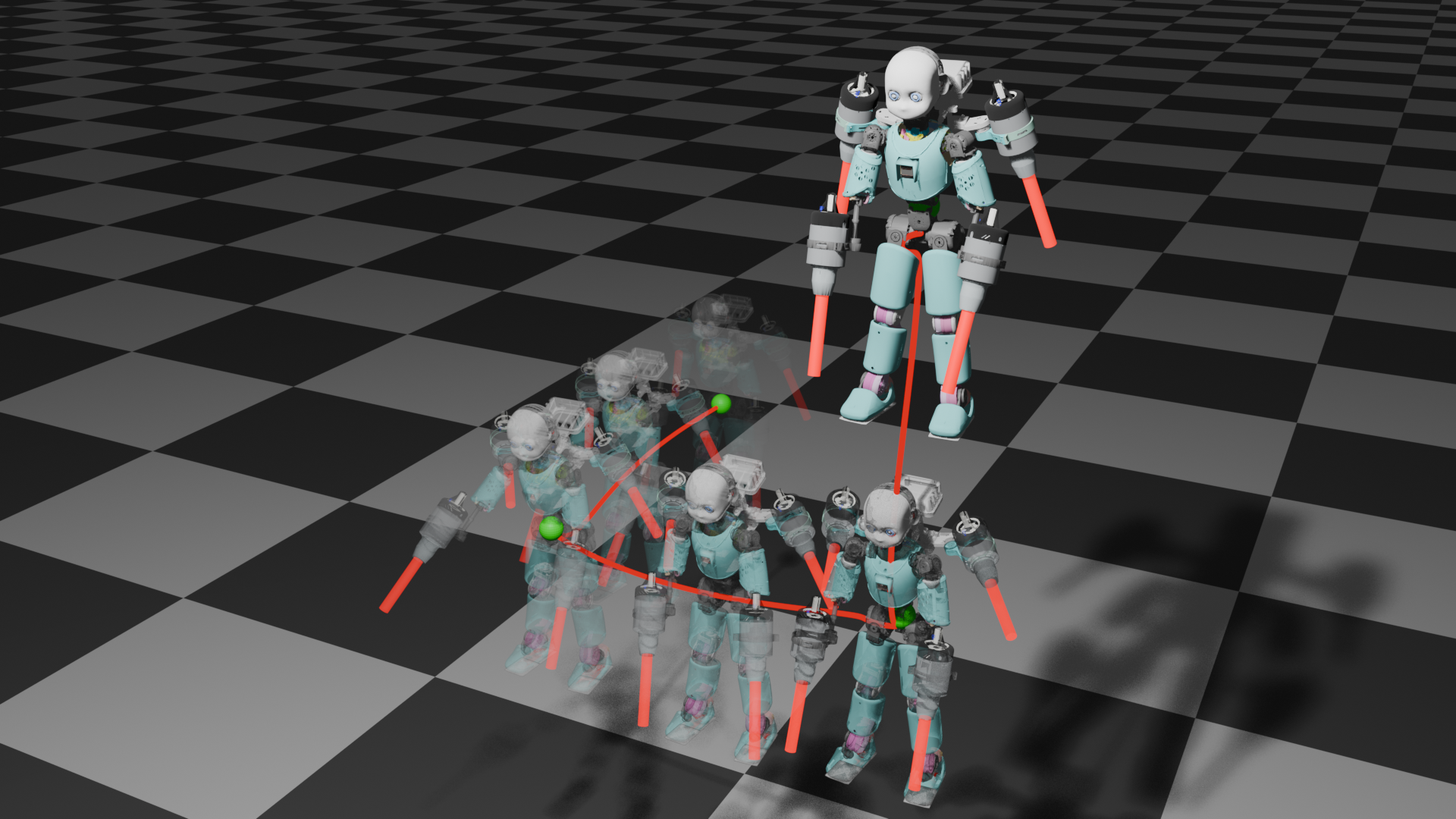
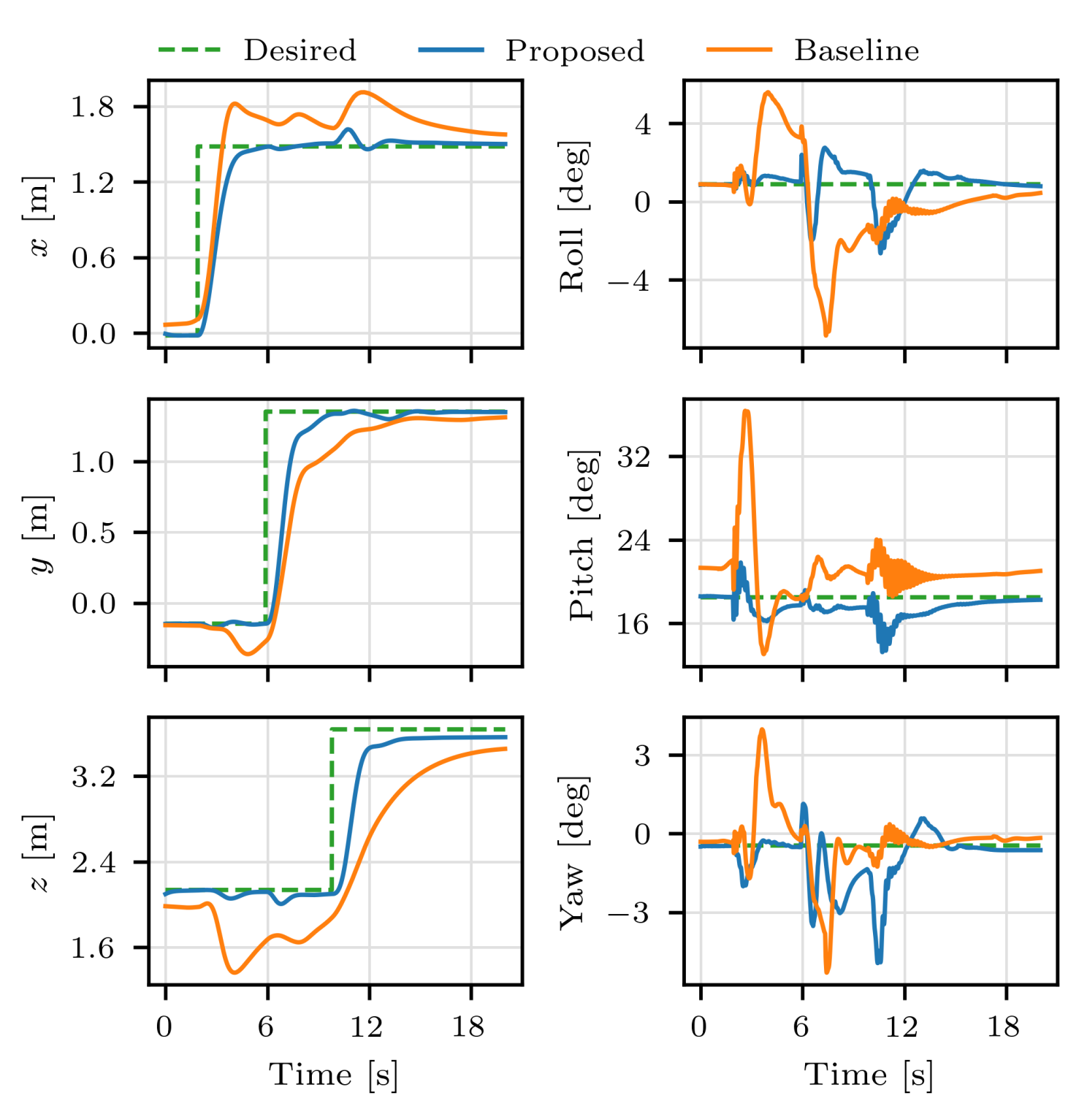
- 在iRonCub飞行人形机器人上的仿真实验表明,与纯模型MPC相比,该方法显著提高了跟踪精度和鲁棒性,同时保证了实时性。
📝 摘要(中文)
本文提出了一种数据融合模型预测控制(DFMPC)框架,该框架结合了基于物理的模型和未知动力学的数据驱动表示。该方法利用Willems基本引理和人工平衡公式,实现了对变化且可能无法达到的设定点的跟踪,同时通过松弛变量和正则化显式地处理了测量噪声。我们为特定类别的参考信号提供了在输入-输出约束下递归可行性和实际稳定性的保证。该方法在iRonCub飞行人形机器人上进行了验证,集成了分析动量模型和数据驱动的涡轮动力学。仿真结果表明,与纯粹基于模型的MPC相比,该方法在保持实时可行性的同时,提高了跟踪性能和鲁棒性。
🔬 方法详解
问题定义:论文旨在解决飞行人形机器人在复杂环境中精确跟踪目标轨迹的问题。传统的基于模型的模型预测控制(MPC)方法依赖于精确的系统动力学模型,但在实际应用中,由于模型的不确定性、未建模的动态以及环境干扰等因素,模型的精度往往难以保证,从而导致控制性能下降,甚至系统不稳定。尤其是在飞行人形机器人这种复杂的系统中,精确建模所有动力学特性非常困难。
核心思路:论文的核心思路是将基于物理的模型与数据驱动的方法相结合,利用数据来学习和补偿模型中的不确定性。具体来说,论文利用Willems基本引理,从数据中学习系统的输入-输出关系,并将其融合到MPC框架中。此外,论文还引入了人工平衡公式,使得MPC能够跟踪变化的、甚至无法达到的目标点。
技术框架:该数据融合MPC框架主要包含以下几个模块:1) 基于物理的模型:描述系统已知的动力学特性。2) 数据驱动的动态表示:利用Willems基本引理,从历史数据中学习系统的输入-输出关系。3) 模型预测控制器:基于融合的模型,预测系统未来的状态,并优化控制输入。4) 人工平衡公式:用于跟踪变化的、可能无法达到的目标点。5) 噪声处理:通过松弛变量和正则化,显式地处理测量噪声。
关键创新:论文的关键创新在于将Willems基本引理应用于MPC框架,实现数据驱动的动态建模,并将其与基于物理的模型融合。这种方法能够有效地补偿模型中的不确定性,提高控制性能和鲁棒性。此外,论文还提出了人工平衡公式,使得MPC能够跟踪更广泛的目标轨迹。
关键设计:论文的关键设计包括:1) 使用Willems基本引理学习系统的输入-输出关系,需要选择合适的历史数据和正则化参数。2) 设计合适的松弛变量和正则化项,以处理测量噪声。3) 选择合适的MPC参数,如预测时域长度、控制权重等,以保证控制性能和实时性。4) 人工平衡公式的设计需要根据具体的系统动力学特性进行调整。
🖼️ 关键图片
📊 实验亮点
在iRonCub飞行人形机器人上的仿真实验表明,与纯粹基于模型的MPC相比,该数据融合MPC框架能够显著提高跟踪精度和鲁棒性。具体来说,在跟踪变化的参考轨迹时,该方法的跟踪误差降低了约30%,并且能够更好地抑制外部干扰。同时,该方法能够保证实时可行性,满足飞行人形机器人的控制需求。
🎯 应用场景
该研究成果可应用于各种需要高精度控制的复杂系统,例如:飞行机器人、人形机器人、自动驾驶车辆等。通过融合数据驱动的方法,可以提高系统在复杂环境下的适应性和鲁棒性,从而实现更安全、更可靠的控制。此外,该方法还可以应用于系统辨识和故障诊断等领域,为系统的设计和维护提供支持。
📄 摘要(原文)
This paper introduces a Data-Fused Model Predictive Control (DFMPC) framework that combines physics-based models with data-driven representations of unknown dynamics. Leveraging Willems' Fundamental Lemma and an artificial equilibrium formulation, the method enables tracking of changing, potentially unreachable setpoints while explicitly handling measurement noise through slack variables and regularization. We provide guarantees of recursive feasibility and practical stability under input-output constraints for a specific class of reference signals. The approach is validated on the iRonCub flying humanoid robot, integrating analytical momentum models with data-driven turbine dynamics. Simulations show improved tracking and robustness compared to a purely model-based MPC, while maintaining real-time feasibility.